Code
from IPython.display import display, Math, Latex, Markdown
import sympy as sp
sp.init_printing()
import matplotlib.pyplot as plt
plt.rcParams.update({'font.size': 16})
import numpy as npfrom IPython.display import display, Math, Latex, Markdown
import sympy as sp
sp.init_printing()
import matplotlib.pyplot as plt
plt.rcParams.update({'font.size': 16})
import numpy as npConsidérons le problème de Cauchy dont on suppose qu’il admet une solution unique \(y(t)\) sur un intervalle \(I=[t_0,T]\) :
\(\begin{cases} y'(t) = \varphi(t,y(t)), &\forall t \in I=[t_0,T],\\ y(t_0) = y_0, \end{cases}\)
Définition.
Notons
\( \varphi_{n-j} \stackrel{\text{def}}{=} \varphi(t_{n-j},u_{n-j}). \)
Soit \(p\ge0\) un entier et posons \(q=p+1\).
On se donne les coefficients \(\{a_j\}_{j=0}^p\) et \(\{b_j\}_{j=-1}^p\) (il y en a \(2q+1\) en tout).
Une méthode multipas linéaire (qu’on appellera simplement multipas, ou multistep) à \(q\) étapes (=pas) s’écrit sous la forme générale d’une combinaison linéaire de valeurs de la solution approchée \(u\) et de la fonction \(\varphi\) en des points de la grille de temps :
\( \begin{aligned} u_{n+1} &= \sum_{j=0}^p a_ju_{n-j} + h\sum_{j=-1}^p b_j\varphi(t_{n-j},u_{n-j}) \\ &= \sum_{j=0}^p \Big(a_ju_{n-j} + b_j\varphi(t_{n-j},u_{n-j}) \Big) + hb_{-1}\varphi(t_{n+1},u_{n+1}), \end{aligned} \qquad n=p,p+1,\dots,N-1. \)
\( u_{n+1} = a_0 u_n + h b_0 \varphi(t_n,u_n) + h b_{-1} \varphi(t_{n+1},u_{n+1}) \)
| Méthode | Formule | \(p\) | \(a_0\) | \(b_{-1}\) | \(b_0\) |
|---|---|---|---|---|---|
| Euler explicite | \(u_{n+1}=u_n+h\varphi(t_n,u_n)\) | 0 | 1 | 0 | 1 |
| Euler implicite | \(u_{n+1}=u_n+h\varphi(t_{n+1},u_{n+1})\) | 0 | 1 | 1 | 0 |
| Crank-Nicolson | \(u_{n+1}=u_n+\frac{h}{2}(\varphi(t_n,u_n)+\varphi(t_{n+1},u_{n+1}))\) | 0 | 1 | \(\frac{1}{2}\) | \(\frac{1}{2}\) |
Les méthodes Adams-Bashforth \(\text{AB}_q\) et Adams-Moulton \(\text{AM}_q\), Nyström \(\text{N}_q\), Milne-Simpson \(\text{MS}_q\) et BDF \(\text{BFD}_q\) sont des méthodes multipas à \(q=p+1\) étapes (=pas) linéaires.
Les méthodes Euler modifié et Heun ne sont pas des méthodes multipas : elles sont des méthodes de la famille Runge-Kutta dont on verra la définition plus tard.
🔴 Théorème d’équivalence de Lax-Ritchmyer : consistance + zéro-stabilité = convergence
Un schéma consistant est convergent ssi il est zéro-stable.
La convergence étudie la résolution du problème de Cauchy sur des intervalles bornés. Dans ce contexte, le nombre \(N\) de sous-intervalles ne tend vers l’infini que lorsque \(h\) tend vers zéro.
Cependant, il existe de nombreuses situations où le problème de Cauchy doit être résolu sur des intervalles de temps très longs, voire infinis. Dans ces cas-là, même pour un \(h\) fixé, \(N\) tend vers l’infini, rendant la notion de zéro-stabilité inapplicable puisque \(T - t_0 \to +\infty\).
On cherche donc des méthodes capables d’approcher la solution sur des intervalles de temps arbitrairement grands, y compris avec des pas de temps \(h\) relativement grands.
Définition : A-stabilité dans \(\mathbb{R}\)
Soit \(\beta > 0\) un réel positif et considérons le problème de Cauchy (modèle simplifié = toy-model) :
\(\begin{cases} y'(t) = -\beta y(t), &\text{pour } t > 0, \\ y(0) = y_0 \end{cases}\)
où \(y_0 \neq 0\) est une valeur initiale donnée. La solution exacte est \(y(t) = y_0 e^{-\beta t}\), d’où :
\(\lim_{t \to +\infty} y(t) = 0.\)
Considérons un pas de temps fixé \(h > 0\) et définissons \(t_n = nh\) pour \(n \in \mathbb{N}\). Notons \(u_n \approx y(t_n)\) une approximation de la solution \(y\) au temps \(t_n\).
Si, sous d’éventuelles conditions sur \(h\), on a
\( \lim_{n \to +\infty} u_n = 0, \)
alors on dit que le schéma est A-stable (ou absolument stable).
Dans ce chapitre nous allons étudier d’abord la convergence (à travers les notions de consistance et de zéro-stabilité) puis la A-stabilité d’une méthode multistep.
Dans l’analyse de ces méthodes, trois polynômes jouent un rôle clé. Pour cela, commençons par réécrire le schéma multistep comme suit:
\( u_{n+1} -\sum_{j=0}^p a_ju_{n-j}= h\left(\sum_{j=0}^p b_j\varphi(t_{n-j},u_{n-j})+b_{-1}\varphi(t_{n+1},u_{n+1})\right). \)
Définition.
Pour \(r\in\mathbb{C}\), on associe à une méthode numérique linéaire multipas les trois polynômes caractéristiques suivants :
\( \varrho(r)=r^{p+1}-\sum_{j=0}^p a_jr^{p-j} \)
\( \sigma(r)=b_{-1}r^{p+1}+\sum_{j=0}^p b_jr^{p-j} \)
\( p_z(r) = \varrho(r) - z \sigma(r) \)
Formellement,
On verra que les racines du polynôme \(\varrho\) sont liées à la zéro-stabilité tandis que celles du polynôme \(p\) sont liées à la stabilité absolue (en association avec un choix particulier de \(z=h\lambda\)).
Exemple : méthodes classiques à \(q=1\) pas :
| Méthode | Formule | \(p\) | \(a_0\) | \(b_{-1}\) | \(b_0\) | \(\varrho(r)\) | \(\sigma(r)\) |
|---|---|---|---|---|---|---|---|
| Euler explicite | \(u_{n+1}=u_n+h\varphi(t_n,u_n)\) | 0 | 1 | 0 | 1 | \(r-1\) | \(1\) |
| Euler implicite | \(u_{n+1}=u_n+h\varphi(t_{n+1},u_{n+1})\) | 0 | 1 | 1 | 0 | \(r-1\) | \(r\) |
| Crank-Nicolson | \(u_{n+1}=u_n+\frac{h}{2}(\varphi(t_n,u_n)+\varphi(t_{n+1},u_{n+1}))\) | 0 | 1 | \(\frac{1}{2}\) | \(\frac{1}{2}\) | \(r-1\) | \(\frac{1}{2}r+\frac{1}{2}\) |
Exemple : méthodes à \(q>1\) pas :
| Méthode | \(p\) | \(\varrho(r)\) | \(\sigma(r)\) |
|---|---|---|---|
| \(\text{AB}_q\) ou \(\text{AM}_q\) | \(q-1\) | \(r^{q+1}-r^{q}=r^{q}(r-1)\) | - |
| \(\text{N}_q\) ou \(\text{MS}_q\) | \(q-1\) | \(r^{q+1}-r^{q-1}=r^{q-1}(r^2-1)\) | - |
| \(\text{BDF}_2\) | \(q-1\) | \((r-1)\left(r-\frac{1}{3}\right)\) | \(\frac{2}{3}\) |
🔴 Théorème (Dahlquist 1956)
Une méthode linéaire multipas est convergente si et seulement si elle est
La convergence est d’ordre \(\omega\) si la méthode est convergente et, de plus, consistante d’ordre \(\omega\).
Une méthode est dite consistante (ou consistante d’ordre au moins 1) si l’erreur de troncature \(\tau(h)=\max_n |\tau_n(h)|\) tend vers zéro quand \(h\) tend vers zéro, où \(\tau_n(h)\) est l’erreur de troncature locale de la méthode multi-pas définie par
\( \tau_n(h)=\frac{1}{h}\left(y_{n+1}-\sum_{j=0}^p a_jy_{n-j}-h\sum_{j=0}^p b_j\varphi(t_{n-j},y_{n-j})-hb_{-1}\varphi(t_{n+1},y_{n+1})\right). \)
Si, de plus, \(\tau(h)=\mathscr{O}(Ch^\omega)\), on dit que la méthode est consistante d’ordre \(\omega\).
Pour évaluer la consistance et son ordre, nous allons introduire une nouvelle quantité \(\xi(i)\).
Définition.
Pour \(i=0,1,\dots\) introduisons la quantité
\( \xi(i) = \sum_{j=0}^p (-j)^{i}a_j+i\sum_{j=-1}^p (-j)^{i-1}b_j, \)
ayant posé \((-j)^0=1\) même pour \(j=0\).
Pour bien comprendre cette définition, on peut écrire les premières valeurs de \(\xi(i)\) :
\( \begin{aligned} \xi(0) &= \sum_{j=0}^p a_j, \\ \xi(1) &= \sum_{j=0}^p -j a_j + \sum_{j=-1}^p b_j, \\ \xi(2) &= \sum_{j=0}^p j^{2} a_j + 2 \sum_{j=-1}^p -j b_j, \\ \xi(3) &= \sum_{j=0}^p (-j)^{3} a_j + 3 \sum_{j=-1}^p j^{2} b_j, \\ &\quad \vdots \end{aligned} \)
Exemple avec un schéma à \(q=4\) pas (et donc \(p=3\)) :
Il n’y a pas de difficulté à calculer ces quantités pour un schéma donné, cependant il faut faire attention à ne pas se tromper dans les calculs, notamment les signes des termes. Pour vous aider, voici un petit script Python qui calcule ces quantités de façon automatique pour un schéma donné. Il suffit de rentrer les valeurs de \(p\) et jusqu’à quel ordre vous voulez calculer les \(\xi(i)\).
## =============================================================================
## Calcul et affichage de xi(i) pour un i donné pour un schema de pas q=p+1
## =============================================================================
def xi(i,p):
q = p+1
aa = sp.symbols(f'a_0:{q}')
bb = sp.symbols(f'b_0:{q}')
bm1 = sp.Symbol('b_{-1}')
p = len(aa)
sa = sum( [ (-j)**i * aa[j] for j in range(p) ] )
sb = bm1+sum( [(-j)**(i-1) * bb[j] for j in range(1,p)] )
## ??? si j=0 et i=0, il calcule (-j)**i =1 et on a bien a_0 dans la somme
## mais si j=0 et i=1 il ne calcule pas b_0 et il faut l'ajouter à la main
if i==1:
sb += bb[0]
xi_rhs = (sa).factor()+(i*sb).factor() ## calcul de xi(i)
display(Markdown(f"$\\xi({i}) = {sp.latex(xi_rhs)}$") ) ## affichage de xi(i)
## return xi_rhs ## retourne xi(i) mais on ne s'en sert pas pour l'instant
## =============================================================================
## Calcul et affichage des xi(i) pour i=0,...,omega
## =============================================================================
def xi_cond(p,omega):
## j = 0...p ## coeffs du schema
## i = 0, ..., omega ordre du schema
q = p+1
display(Markdown(f"**Pour ${p=}$, on a une méthode à $q={p+1}$ pas et on affiche $ξ(i)$ pour $i=0,...,{omega}$**"))
for i in range(omega+1):
xi(i,p)
## =============================================================================
## Exemple d'utilisation
## Calcul des xi(i) pour i=0,...,omega
## =============================================================================
xi_cond(p=1,omega=5) Pour \(p=1\), on a une méthode à \(q=2\) pas et on affiche \(ξ(i)\) pour \(i=0,...,5\)
\(\xi(0) = a_{0} + a_{1}\)
\(\xi(1) = - a_{1} + b_{0} + b_{1} + b_{-1}\)
\(\xi(2) = a_{1} - 2 \left(b_{1} - b_{-1}\right)\)
\(\xi(3) = - a_{1} + 3 \left(b_{1} + b_{-1}\right)\)
\(\xi(4) = a_{1} - 4 \left(b_{1} - b_{-1}\right)\)
\(\xi(5) = - a_{1} + 5 \left(b_{1} + b_{-1}\right)\)
La proposition suivante donne une condition nécessaire et suffisante pour la consistance d’une méthode multipas.
Par un développement de Taylor (assez fastidieux), on peut montrer que :
🔴 Proposition [consistance et ordre de consistance]
La méthode est consistante (ou, plus précisément, consistante d’ordre au moins 1) ssi \(\xi(0)=\xi(1)=1\).
La méthode est consistante d’ordre \(\omega\ge2\) ssi \(\xi(0)=\xi(1)=\dots=\xi(\omega)=1\).
Remarques :
La condition de consistance d’ordre au moins 1 est une condition nécessaire pour la convergence d’une méthode numérique.
La condition de consistance d’ordre \(\omega\) signifie que toutes les valeurs de \(\xi(i)\) sont égales à 1 pour \(i\) allant de 0 à \(\omega\), et non pas seulement \(\xi(\omega)\).
Exercice : montrer que
\( \begin{cases} \xi(0)=1\\ \xi(1)=1 \end{cases} \iff \begin{cases} \varrho(1)=0\\ \varrho'(1)=\sigma(1) \end{cases} \)
Remarque : il s’agit de démontrer que le premier système est équivalent au second. Cela ne signifie pas que chaque équation du premier système est équivalente à l’équation correspondante du second système, ce qui n’est pas le cas.
Correction
Rappelons les définitions de \(\xi(0)\), \(\xi(1)\) et des polynômes \(\varrho\) et \(\sigma\). Calculons ensuite \(\varrho'\) :
\(\begin{aligned} \xi(0)&=\sum_{j=0}^p a_j & \varrho(r)&=r^{p+1}-\sum_{j=0}^p a_jr^{p-j} & \varrho'(r)&=(p+1)r^{p}-\sum_{j=0}^p (p-j)a_jr^{p-j-1} \\ \xi(1)&=\sum_{j=0}^p -j a_j + \sum_{j=-1}^p b_j & \sigma(r)&=b_{-1}r^{p+1}+\sum_{j=0}^p b_jr^{p-j}=\sum_{j=-1}^p b_jr^{p-j} && \end{aligned}\)
Évaluons \(\varrho\) et \(\varrho'-\sigma\) en \(1\):
\(\begin{aligned} \varrho(1) &=1-\sum_{j=0}^p a_j = 1-\xi(0) \\ \varrho'(1)-\sigma(1) &=(p+1)-\sum_{j=0}^p (p-j)a_j -\sum_{j=-1}^p b_j= p\left(1-\sum_{j=0}^p a_j\right) +1-\sum_{j=0}^p -ja_j -\sum_{j=-1}^p b_j= p(1-\xi(0))+1-\xi(1) \end{aligned}\)
donc
\( \varrho(1)=0 \qquad\iff\qquad 1-\xi(0)=0 \)
et
\( \varrho'(1)-\sigma(1) = 0 \qquad\iff\qquad p(1-\xi(0))+1-\xi(1)=0 \)
Bien noter que
Exercice : étudier la consistance et l’ordre de consistance du schéma multipas linéaire \(\text{AB}_2\)
\( u_{n+1} = u_n + \frac{h}{2} \left( 3\varphi_n - \varphi_{n-1} \right) \)
Correction
\(p=1\) \(\leadsto\) \(q=2\) : c’est un schéma de la forme
\( u_{n+1}= \underset{= \, 1}{a_0} u_n + \underset{= \, 0}{a_1} u_{n-1} + h \left( \underset{= \, \frac{3}{2}}{b_0} \varphi_n + \underset{= \, -\frac{1}{2}}{b_1} \varphi_{n-1} \right) + h \underset{= \, 0}{b_{-1}} \varphi_{n+1} \)
Notons que \(b_{-1}=0\) \(\leadsto\) le schéma est explicite.
On vérifie la consistance en calculant les premières deux valeurs de $ (i) $. Pour afficher \(\xi(0)\) et \(\xi(1)\) dans le cas général, on peut utiliser la fonction précédente :
xi_cond(p=1,omega=1) Pour \(p=1\), on a une méthode à \(q=2\) pas et on affiche \(ξ(i)\) pour \(i=0,...,1\)
\(\xi(0) = a_{0} + a_{1}\)
\(\xi(1) = - a_{1} + b_{0} + b_{1} + b_{-1}\)
Maintenant on remplace les valeurs des coefficients dans les formules de \(\xi(i)\) pour obtenir les valeurs de \(\xi(0)\) et \(\xi(1)\).
\(\begin{aligned} \xi(0) &= 1 + 0 = 1 \\ \xi(1) &= -0+\frac{3}{2}-\frac{1}{2}+0 = 1 \end{aligned}\)
Le schéma est consistante, c’est à dire qu’il est d’ordre au moins 1.
Pour vérifier si le schéma est consistant d’ordre 2, on doit calculer \(\xi(2)\) et vérifier si \(\xi(2)=1\). Pour cela, affichons \(\xi(i)\) pour \(i=2\) dans le cas général :
xi(i=2,p=1) ## xi(2) avec p=1\(\xi(2) = a_{1} - 2 \left(b_{1} - b_{-1}\right)\)
On évalue alors \(\xi(2)\) :
\( \xi(2) = 0 - 2\left(-\frac{1}{2}-0\right) = 1 \)
donc le schéma est consistant d’ordre au moins 2.
Pour vérifier si le schéma est consistant d’ordre au moins 3, on doit calculer \(\xi(3)\) et vérifier si \(\xi(3)=1\). Pour cela, affichons \(\xi(i)\) pour \(i=3\) dans le cas général :
xi(i=3,p=1) ## xi(3) avec p=1\(\xi(3) = - a_{1} + 3 \left(b_{1} + b_{-1}\right)\)
On évalue alors \(\xi(3)\) :
\( \xi(3) = 0 + 3\left(-\frac{1}{2}+0\right) \neq 1 \)
donc le schéma n’et pas d’ordre 3. On conclut qu’il est consistant d’ordre exactement 2.
🔴 Proposition [zéro-stabilité et condition des racines]
Soient \(r_0, r_1,\dots, r_p\) les \(p+1\) racines (dans \(\mathbb{C}\)) du premier polynôme caractéristique \(\varrho(r)=r^{p+1}-\sum_{j=0}^p a_jr^{p-j}\).
La méthode est zéro-stable ssi
\( \begin{cases} |r_j|\le1 \quad\text{pour tout }j=0,\dots,p \\ r_j\text{ a multiplicité}>1\quad\implies \quad |r_j|<1. \end{cases} \)
Explication :
Exemple : étudier la zéro-stabilité des méthodes Euler explicite, Euler implicite, Crank-Nicolson, de Adams à \(q\) pas, de Nystrom et Milne-Simpson à \(q\) pas et des méthodes BDF.
Méthodes à un pas (Euler explicite, Euler implicite, Crank-Nicolson) :
Ces méthodes ont pour polynôme caractéristique :
\( \varrho(r) = r - 1 \quad\leadsto\quad\text{il n'y a qu'une seule racine : } r = 1 \)
Par conséquent, toutes ces méthodes sont zéro-stables. Ainsi, pour les méthodes à un pas, on peut conclure que :
\( \text{Convergence} \iff \text{Consistance} \)
Méthodes de Adams à \(q\) pas :
Ces méthodes ont pour polynôme caractéristique :
\( \varrho(r) = r^{p+1} - r^p = r^p(r - 1) \quad\leadsto\quad\text{il y a deux racines : $r = 1$ (multiplicité 1) et $r = 0$ (multiplicité $p$)} \)
Ces méthodes sont donc zéro-stables. Ici aussi, on peut conclure que :
\( \text{Convergence} \iff \text{Consistance} \)
Méthodes de Nystrom et Milne-Simpson à \(q\) pas :
Pour ces méthodes, le polynôme caractéristique est :
\( \varrho(r) = r^{p+1} - r^{p-1} = r^{p-1}(r - 1)(r + 1) \quad\leadsto\quad\text{il y a trois racines : $r = 1$ (multiplicité 1), $r = 0$ (multiplicité $p - 1$), et $r = -1$ (multiplicité 1)} \)
Ces méthodes sont également zéro-stables. Ainsi, on peut également conclure que :
\( \text{Convergence} \iff \text{Consistance} \)
Méthodes BDF :
Il est possible de montrer que les méthodes BDF sont zéro-stables si et seulement si \(p \leq 5\) (ce qui correspond à \(q \leq 6\), comme le montre le calcul effectué avec sympy ci-dessous).
Il est possible de démontrer que la zero stabilité implique une restriction sur l’ordre maximal atteignable pour une méthode multipas. On appelle cette contrainte la première barrière de Dahlquist :
⚠ Première barrière de Dahlquist [limitation de l’ordre maximal de convergence]
L’ordre \(\omega\) d’une méthode multipas à \(q\) étapes convergente satisfait les inégalités suivantes :
Remarque : la première barrière de Dalquist affirme qu’on peut augmenter arbitrairement l’ordre d’un schéma multipas en augmentant le nombre de pas. La convergence dépendra ensuite juste du premier polynôme caractéristique (c’est à dire de la zéro-stabilité).
Exercie : vérifier la première barrière de Dahlquist pour les méthodes Euler explicite, Euler implicite, Crank-Nicolson, de Adams-Bashforth et Adams-Moulton avec \(q=1,2\) pas et Milne-Simpson avec \(q=2\) pas.
| Schéma | Type | Ordre maximal prévu par la barrière | Ordre réel \(\omega\) | Remarque |
|---|---|---|---|---|
| EE | Explicite | \(q=1\) | 1 | - |
| \(\text{AB}_2\) | Explicite | \(q=2\) | 2 | - |
| EI | Implicite, \(q\) impair | \(q+1 = 2\) | 1 | Non optimal : ordre réel \(1\), inférieur à l’ordre maximal \(2\) |
| CN | Implicite, \(q\) impair | \(q+1 = 2\) | 2 | - |
| \(\text{AM}_2\) | Implicite, \(q\) pair | \(q+2 = 4\) | 3 | Non optimal : ordre réel \(3\), inférieur à l’ordre maximal \(4\) |
| \(\text{MS}_2\) | Implicite, \(q\) pair | \(q+2 = 4\) | 4 | - |
Le script suivant permet de vérifier la première barrière de Dahlquist pour une méthode donnée. Il suffit de rentrer la valeur de \(p\) et le script affiche l’ordre maximal de convergence prédit par la barrière de Dahlquist ainsi que les équations à vérifier pour chaque cas.
## j = 0...p ## coeffs du schema
## q = p+1 ## nb de pas
## ω ## ordre de la méthode
p = 3
q = p+1
ordre_max = q+2 if q%2==0 else q+1
display(Markdown(f"**On considère une méthode à q={q} pas (et donc p={p})**"))
display(Markdown(f"**Elle est d'ordre au plus {ordre_max}. Voici les conditions à satisfaire.**"))
aa = sp.symbols(f'a_0:{q}')
bb = sp.symbols(f'b_0:{q}')
bm1 = sp.Symbol('b_{-1}')
i = 1
sa = sum( [-j*aa[j] for j in range(len(aa))] )
sb = bm1+sum( [bb[j] for j in range(len(bb))] )
display(Markdown(f"- Pour que la méthode soit consistante (c'est-à-dire d'ordre au moins {i}) elle doit vérifier les deux conditions : "))
display(Markdown( r"$\qquad\qquad " + sp.latex(sp.Eq( sum(aa).factor() , 1 ) ) + "$" ))
display(Markdown( r"$\qquad\qquad " + sp.latex(sp.Eq( (sa).factor()+(i*sb).factor() , 1 ) ) + "$" ))
for i in range(2,ordre_max+1):
sa = sum( [(-j)**i*aa[j] for j in range(len(aa))] )
sb = bm1+sum( [(-j)**(i-1)*bb[j] for j in range(1,len(bb))] )
display(Markdown(f"- Pour que la méthode soit d'ordre au moins {i} elle doit vérifier, en plus des précédentes, la condition : "))
display(Markdown( r"$\qquad\qquad " + sp.latex(sp.Eq( (sa).factor()+(i*sb).factor() , 1 ) ) + "$" ))
On considère une méthode à q=4 pas (et donc p=3)
Elle est d’ordre au plus 6. Voici les conditions à satisfaire.
\(\qquad\qquad a_{0} + a_{1} + a_{2} + a_{3} = 1\)
\(\qquad\qquad - a_{1} - 2 a_{2} - 3 a_{3} + b_{0} + b_{1} + b_{2} + b_{3} + b_{-1} = 1\)
\(\qquad\qquad a_{1} + 4 a_{2} + 9 a_{3} - 2 \left(b_{1} + 2 b_{2} + 3 b_{3} - b_{-1}\right) = 1\)
\(\qquad\qquad - a_{1} - 8 a_{2} - 27 a_{3} + 3 \left(b_{1} + 4 b_{2} + 9 b_{3} + b_{-1}\right) = 1\)
\(\qquad\qquad a_{1} + 16 a_{2} + 81 a_{3} - 4 \left(b_{1} + 8 b_{2} + 27 b_{3} - b_{-1}\right) = 1\)
\(\qquad\qquad - a_{1} - 32 a_{2} - 243 a_{3} + 5 \left(b_{1} + 16 b_{2} + 81 b_{3} + b_{-1}\right) = 1\)
\(\qquad\qquad a_{1} + 64 a_{2} + 729 a_{3} - 6 \left(b_{1} + 32 b_{2} + 243 b_{3} - b_{-1}\right) = 1\)
Récapitulatif des méthodes multipas vues jusqu’ici:
sc = { "EE = AB_1" : { "aa":[1], "bb":[ 1], "bm1":0 },
"EI = AM_0 = BDF_1" : { "aa":[1], "bb":[ 0], "bm1":1 },
"CN = AM_1" : { "aa":[1], "bb":[sp.Rational(1,2)], "bm1":1/2 },
"AB_2": { "aa":[1,0], "bb":[sp.Rational(3,2),sp.Rational(-1,2)], "bm1":0 },
"AB_3": { "aa":[1,0,0], "bb":[sp.Rational(23,12),sp.Rational(-16,12), sp.Rational(5,12)], "bm1":0 },
"AB_4": { "aa":[1,0,0,0], "bb":[sp.Rational(55,24),sp.Rational(-59,24), sp.Rational(37,24), sp.Rational(-9,24)], "bm1":0 },
"AB_5": { "aa":[1,0,0,0,0], "bb":[sp.Rational(1901,720), sp.Rational(-2774,720), sp.Rational(2616,720), sp.Rational(-1274,720), sp.Rational(251,720)], "bm1":0 },
"AM_2": { "aa":[1,0], "bb":[sp.Rational(8,12),sp.Rational(-1,12)], "bm1":sp.Rational(5,12) },
"AM_3": { "aa":[1,0,0], "bb":[sp.Rational(19,24),sp.Rational(-5,24),sp.Rational(1,24)], "bm1":sp.Rational(9,24) },
"AM_4": { "aa":[1,0,0,0], "bb":[sp.Rational(646,720),sp.Rational(-264,720),sp.Rational(106,720),sp.Rational(-19,720)], "bm1":sp.Rational(251,720) },
"BDF_2": { "aa":[sp.Rational(4,3),sp.Rational(-1,3)], "bb":[0,0], "bm1":sp.Rational(2,3) },
"BDF_3": { "aa":[sp.Rational(18,11),sp.Rational(-9,11),sp.Rational(2,11)], "bb":[0,0,0], "bm1":sp.Rational(6,11) },
"BDF_4": { "aa":[sp.Rational(48,25),sp.Rational(-36,25),sp.Rational(16,25),sp.Rational(-3,25)], "bb":[0,0,0,0], "bm1":sp.Rational(12,25) },
"BDF_5": { "aa":[sp.Rational(300,137),sp.Rational(-300,137),sp.Rational(200,137),sp.Rational(-75,137),sp.Rational(12,137)], "bb":[0,0,0,0,0], "bm1":sp.Rational(60,137) },
"BDF_6": { "aa":[sp.Rational(120,49),sp.Rational(-150,49),sp.Rational(400,147),sp.Rational(-75,49),sp.Rational(24,49),sp.Rational(-10,147)], "bb":[0,0,0,0,0,0], "bm1":sp.Rational(20,49) },
"MS_2": { "aa":[0,1], "bb":[sp.Rational(4,3),sp.Rational(1,3)], "bm1":sp.Rational(1,3) }
}
sp.var('r')
for schema in sc.keys():
display(Markdown(f"**{schema}**"))
q = len(sc[schema]["aa"])
p = q-1
display(Markdown(f" - Schéma à {q = } pas"))
aa = sc[schema]["aa"]
bb = sc[schema]["bb"]
bm1 = sc[schema]["bm1"]
if bm1==0:
display(Markdown(f"- Le schéma est explicite car $b_{-1}=0$."))
else:
display(Markdown(f"- Le schéma est implicite car $b_{-1}={bm1}$."))
ordre = []
ordre.append( sum(aa)==1 and sum([-j*aa[j] for j in range(len(aa))])+bm1+sum(bb)==1 )
# print("\tConsistance: ",end="")
# print(ordre[-1])
display(Markdown(f"- Consistance: {ordre[-1]}"))
i=1
while ordre[-1]:
i += 1
ordre.append( sum([(-j)**i*aa[j]+i*(-j)**(i-1)*bb[j] for j in range(len(aa))])+i*bm1==1)
## print(f"\tOrdre {len(ordre)-1}")
display(Markdown(f"- Ordre {len(ordre)-1}"))
rho = np.array([1])
rho = np.append(rho,-np.array(aa))
rho_sp = sp.Poly(rho,r).as_expr()
# display(Math(r'\varrho(r)='+sp.latex(sp.expand(poly1d(rho)(r)))))
display(Markdown(f"- Polynome: $\\varrho(r) = {sp.latex(rho_sp)}$"))
# print(f"\tZéro-stabilité: |r_j|= {abs(roots(rho))}")
# print("\tRacines: ",end="")
# display(sp.solve(sp.expand(poly1d(rho)(r))))
display(Markdown(f"- Ensemble des modules des racines : "))
display( Math(r' \{|r_j|\} = '+sp.latex( [abs(rac).simplify().evalf() for rac in sp.solve(rho_sp)] ))) EE = AB_1
\(\displaystyle \{|r_j|\} = \left[ 1.0\right]\)
EI = AM_0 = BDF_1
\(\displaystyle \{|r_j|\} = \left[ 1.0\right]\)
CN = AM_1
\(\displaystyle \{|r_j|\} = \left[ 1.0\right]\)
AB_2
\(\displaystyle \{|r_j|\} = \left[ 0, \ 1.0\right]\)
AB_3
\(\displaystyle \{|r_j|\} = \left[ 0, \ 1.0\right]\)
AB_4
\(\displaystyle \{|r_j|\} = \left[ 0, \ 1.0\right]\)
AB_5
\(\displaystyle \{|r_j|\} = \left[ 0, \ 1.0\right]\)
AM_2
\(\displaystyle \{|r_j|\} = \left[ 0, \ 1.0\right]\)
AM_3
\(\displaystyle \{|r_j|\} = \left[ 0, \ 1.0\right]\)
AM_4
\(\displaystyle \{|r_j|\} = \left[ 0, \ 1.0\right]\)
BDF_2
\(\displaystyle \{|r_j|\} = \left[ 0.333333333333333, \ 1.0\right]\)
BDF_3
\(\displaystyle \{|r_j|\} = \left[ 1.0, \ 0.426401432711221, \ 0.426401432711221\right]\)
BDF_4
\(\displaystyle \{|r_j|\} = \left[ 1.0, \ 0.56086151609339, \ 0.56086151609339, \ 0.38147840911841\right]\)
BDF_5
\(\displaystyle \{|r_j|\} = \left[ 1.0, \ 0.708710816266406, \ 0.417600758175733, \ 0.708710816266406, \ 0.417600758175733\right]\)
BDF_6
\(\displaystyle \{|r_j|\} = \left[ 1.0, \ 0.40612326685391, \ 0.474034857706592, \ 0.474034857706592, \ 0.863380267869827, \ 0.863380267869827\right]\)
MS_2
\(\displaystyle \{|r_j|\} = \left[ 1.0, \ 1.0\right]\)
Dans la section précédente, nous avons abordé la résolution du problème de Cauchy sur des intervalles bornés \([t_0, T]\) . La convergence de la méthode numérique dépend de la consistance et de la zéro-stabilité. Pour étudier la consistance, on définit \(h=(T-t_0)/N\) et on introduit les points équidistants \(t_n = t_0 + nh\) avec \(n = 0, 1, \dots, N\). On fait tendre le nombre de points \(N+1\) vers l’infini (ou \(h\) vers 0), tout en maintenant l’intervalle de temps \([t_0, T]\) figé. On étudie alors la limite de l’erreur de troncature locale \(\tau(h)\) lorsque \(h\) tend vers 0.
Cependant, dans certaines situations, il est nécessaire d’intégrer le problème de Cauchy sur des intervalles de temps très longs, voire infinis. Dans ce cas, même pour un \(h\) fixé, \(N\) devient infini, et des résultats tels que la zéro-stabilité ne sont plus pertinents. L’objectif ici est d’étudier la capacité des méthodes à approcher la solution sur des intervalles de temps arbitrairement grands, tout en maintenant un pas de temps \(h\) fixe, et éventuellement “assez grand”. C’est ce que l’on appelle l’A-stabilité.
Définition : Schéma A-stable (dans \(\mathbb{C}\))
Soit \(\lambda\in\mathbb{C}\) un nombre complexe tel que \(\Re(\lambda)=-\beta<0\) et considérons le problème de Cauchy
\(\begin{cases} y'(t)=\lambda y(t), &\text{pour }t>0,\\ y(0)=1. \end{cases}\)
La solution exacte est donnée par \(y(t)=e^{\lambda t}\). Comme \(\Re(\lambda)<0\), alors \(\lim_{t\to+\infty}|y(t)|=0.\)
Soit \(h>0\) un pas de temps donné et soit \(t_n=nh\) pour \(n\in\mathbb{N}\). Notons \(u_n\approx y(t_n)\) une approximation de la solution au temps \(t_n\).
On dit que le schéma numérique est A-stable si, pour tout \(\lambda\) vérifiant \(\Re(\lambda) < 0\), la suite numérique satisfait
\(\lim_{n\to+\infty} |u_n| =0.\)
Lorsque cette propriété est vérifiée pour tout pas de temps \(h > 0\), le schéma est dit inconditionnellement A-stable (ou absolument stable). Si elle n’est vérifiée que sous certaines restrictions sur \(h\), on dit que le schéma est A-stable sous condition.
Lien avec l’étude de la A-stabilité dans \(\mathbb{R}\) : \(\lambda = -\beta\) réel négatif, ainsi \(z = h\lambda = -h\beta\) (également réel négatif). Dans ce contexte, on retrouve la condition de A-stabilité vue précédemment dans \(\mathbb{R}\) : la solution approchée \(u_n\) doit tendre vers zéro lorsque \(n\) tend vers l’infini, pour tout pas de temps \(h > 0\).
Exemples : méthode multi-pas linéaire
Notons \(z = h\lambda\). Une méthode multi-pas linéaire à \(q=p+1\) pas appliquée au problème modèle conduit à l’équation récurrente
\( u_{n+1} = \frac{1}{\big(1-z b_{-1}\big)}\sum_{j=0}^p \big(a_j + z b_j\big) u_{n-j} \)
Si \(q=1\) on a un schéma à un pas et l’équation récurrente s’écrit
\( u_{n+1} = \frac{a_0 + z b_0}{\big(1-z b_{-1}\big)} u_n \)
Ainsi, si \(| (a_0 + z b_0)/(1 - z b_{-1}) | < 1\) alors \(\lim_{n\to+\infty} |u_n| = 0\).
Si \(q>1\) on a un schéma multipas et l’équation récurrente s’écrit \( u_{n+1} - \frac{1}{\big(1-z b_{-1}\big)}\sum_{j=0}^p \big(a_j + z b_j\big) u_{n-j} = 0 \) Pour étudier la stabilité de cette équation récurrente on verra ci-dessous qu’il faut étudier les racines du polynôme caractéristique associé.
Définition : Région de A-stabilité (dans \(\mathbb{C}\))
On appelle région de stabilité absolue \(A\) d’une méthode numérique l’ensemble des nombres complexes \(z = h\lambda\) pour lesquels la méthode est absolument stable : \( A=\Big\{z = h\lambda \in \mathbb{C} \ \Big| \ |u_n|\xrightarrow[n\to+\infty]{}0 \Big\} \) Une méthode numérique est inconditionellement A-stable si \(\mathbb{C}^-\subset A\) où \(\mathbb{C}^-=\{z\in\mathbb{C}|\Re(z)<0\}\).
Les images affichées ci-dessous montrent les régions de A-stabilité des quelques méthodes vues en précédence et sont issues du livre
A. Quarteroni, F. Saleri, P. Gervasio Calcul Scientifique: Cours, exercices corrigés et illustrations en Matlab et Octave.
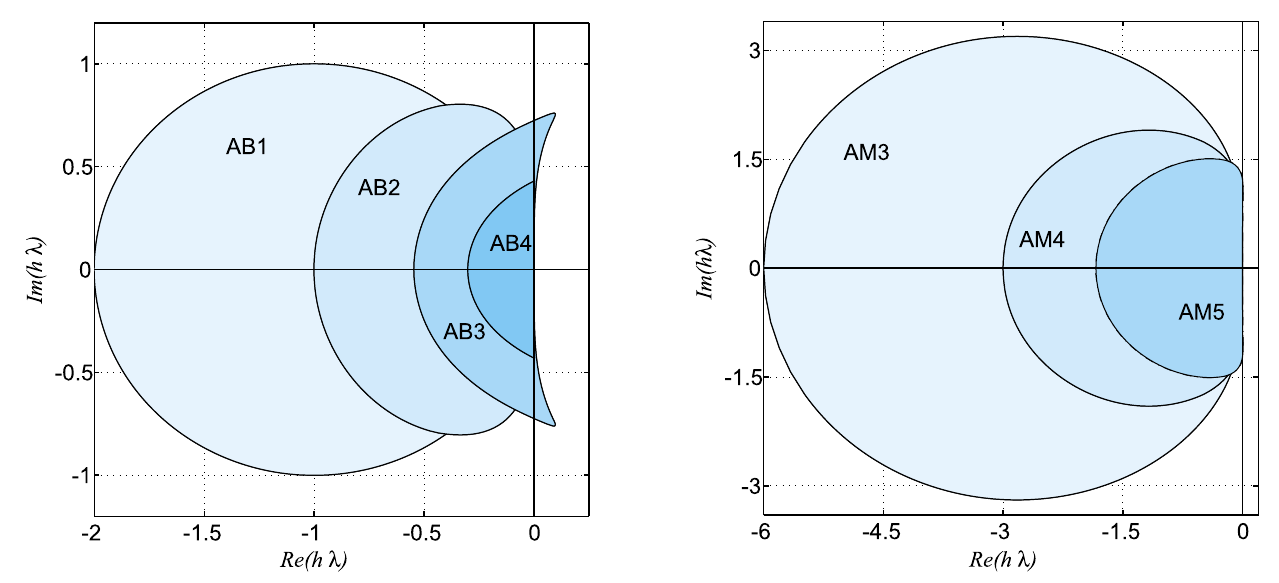
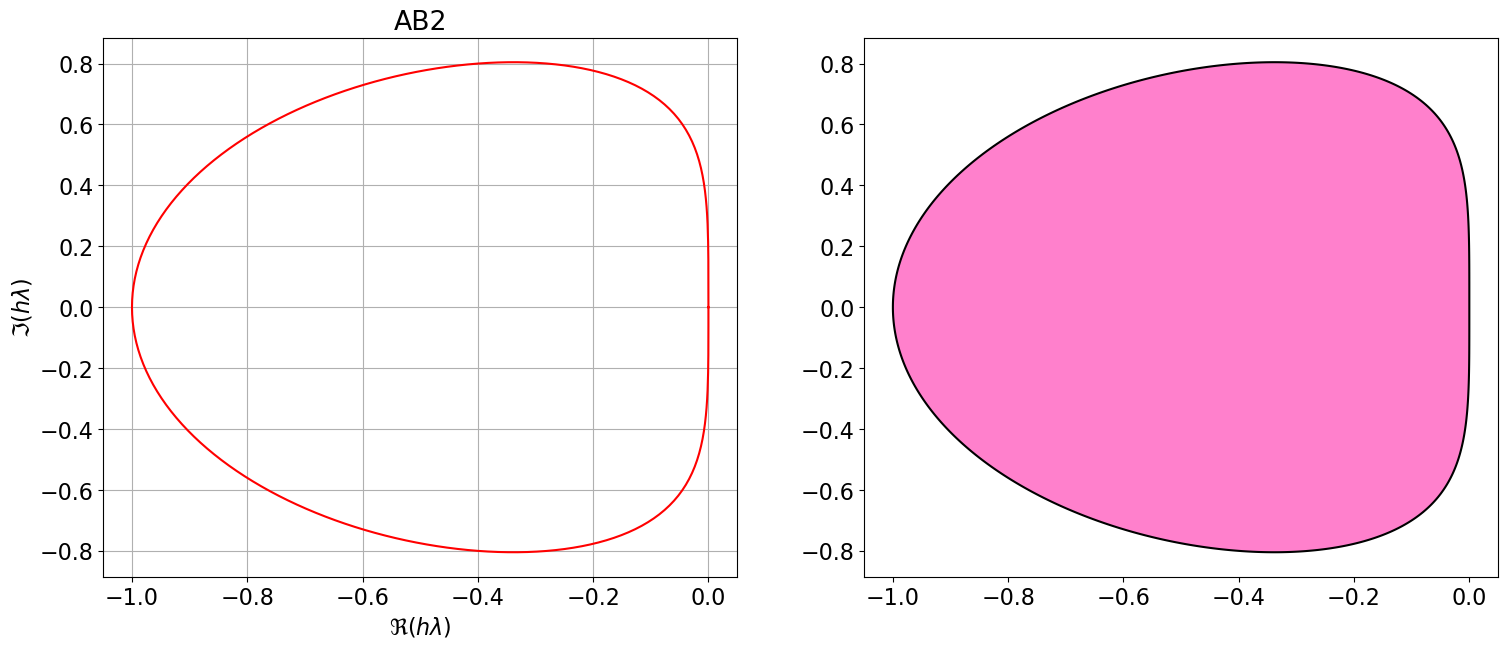
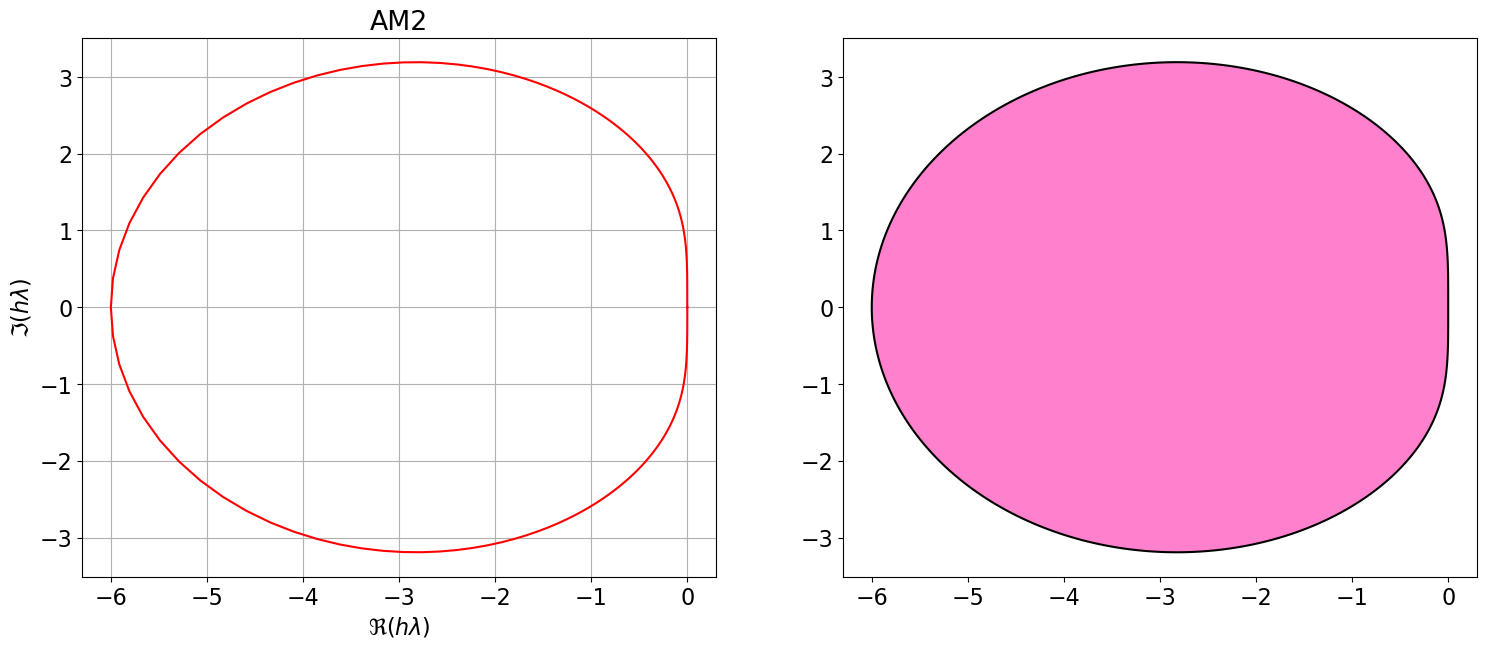
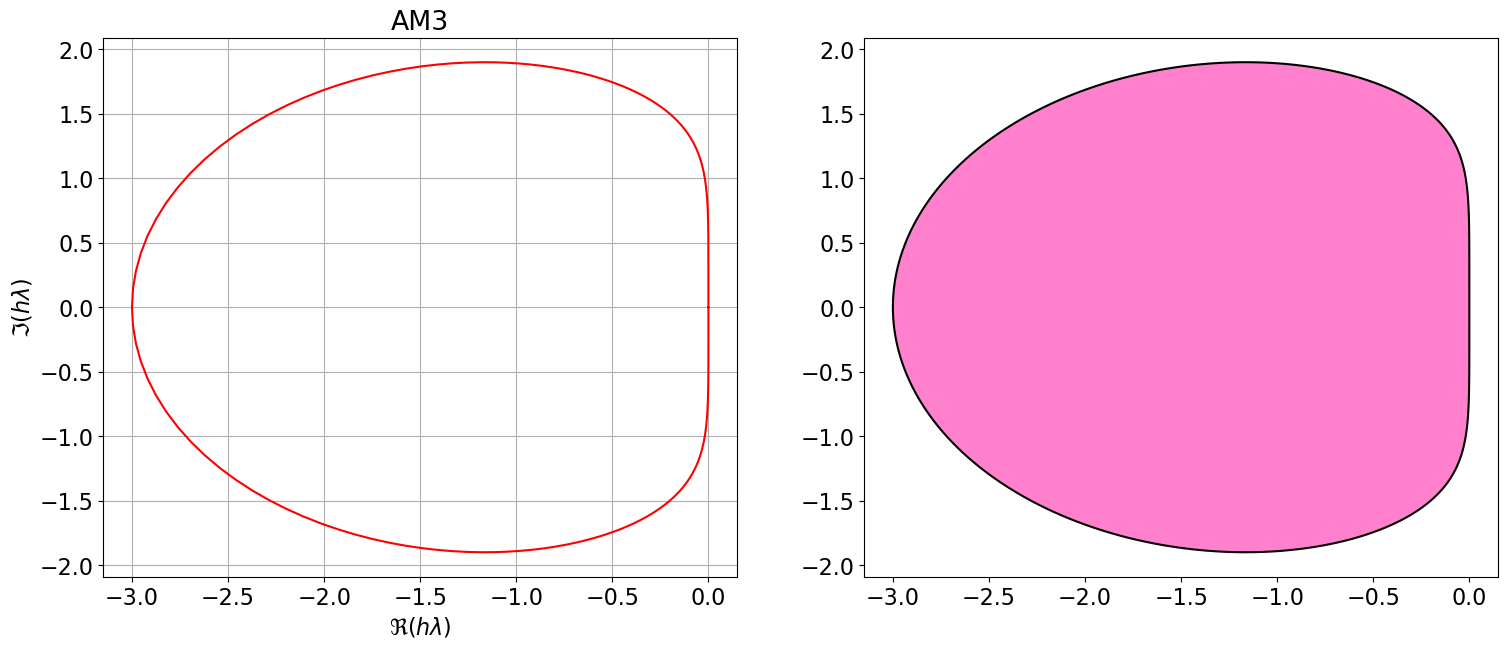
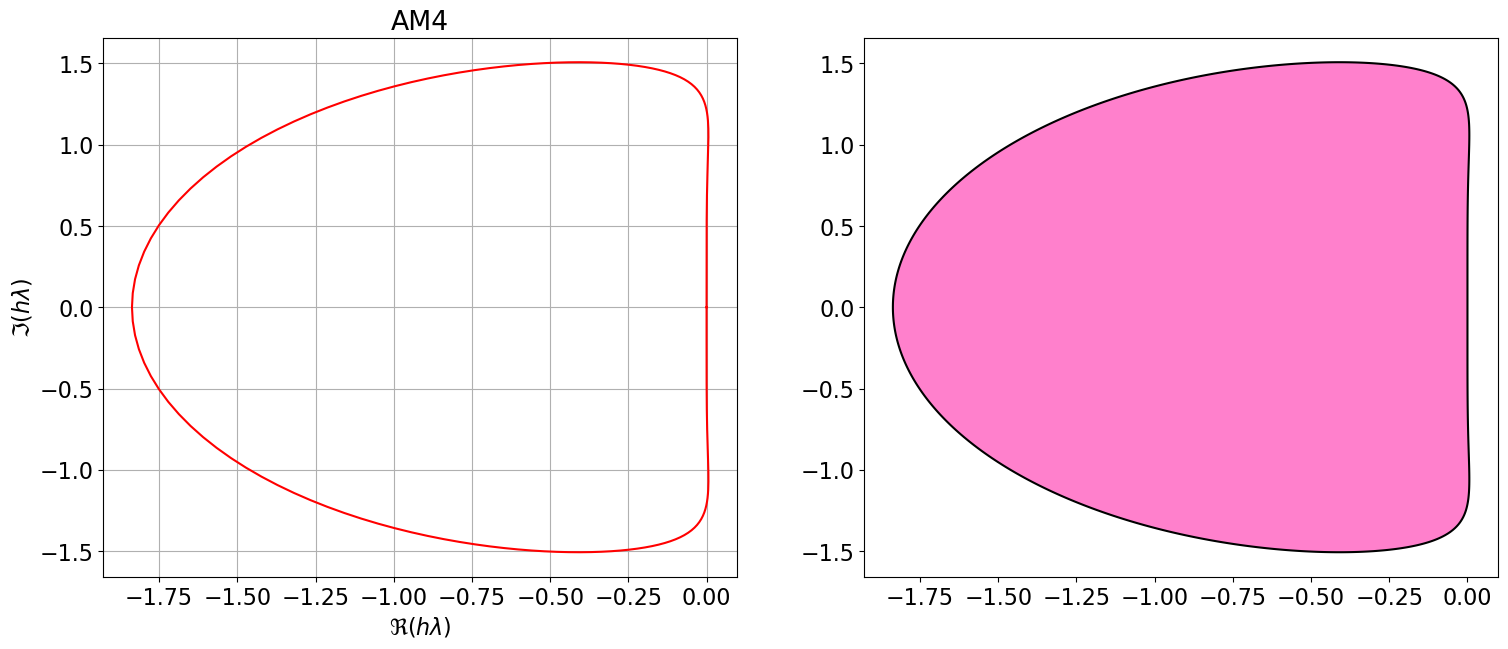
Régions de A-stabilité des méthodes d’Adams-Bashforth et d’Adams-Moulton
Les figures ci-dessous illustrent les régions de stabilité absolue des méthodes :
- À gauche : Adams-Bashforth (AB), qui sont des schémas explicites.
- À droite : Adams-Moulton (AM), qui sont des schémas implicites.
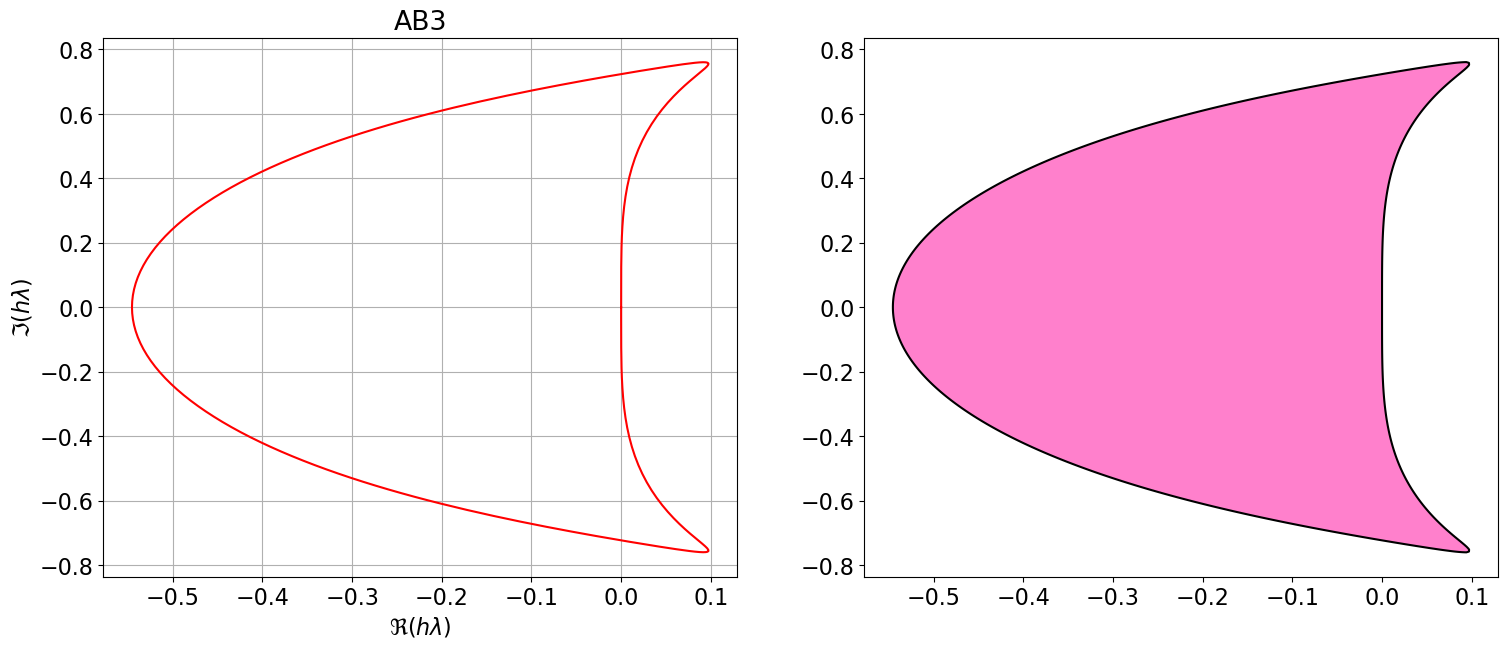
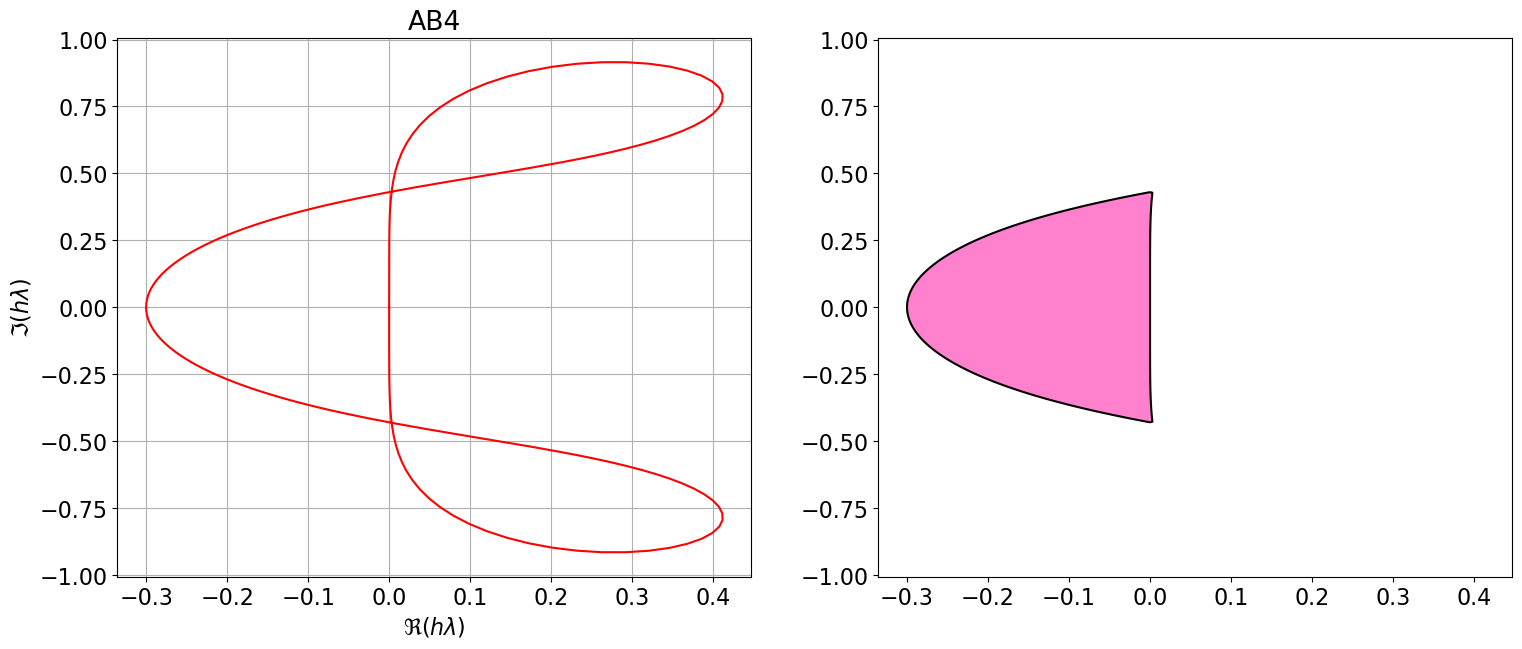
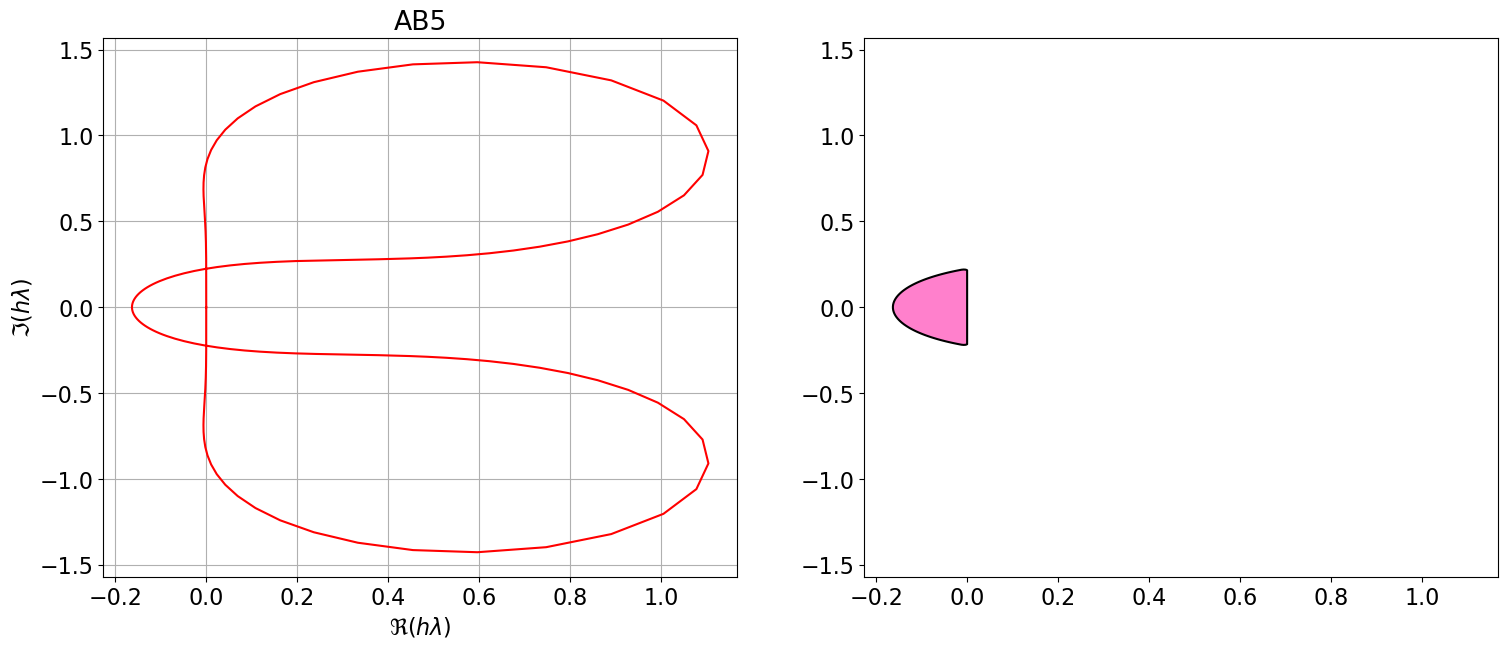
On observe que :
- Ces régions sont bornées et diminuent à mesure que l’ordre augmente.
- De plus, toutes les méthodes explicites et les méthodes implicites d’ordre supérieur à 2 ne sont pas inconditionnellement A-stables.
- Elles ne conviennent donc pas aux problèmes nécessitant une intégration sur de très longs intervalles de temps, car elles imposent une contrainte sur la taille du pas de temps \(h\).
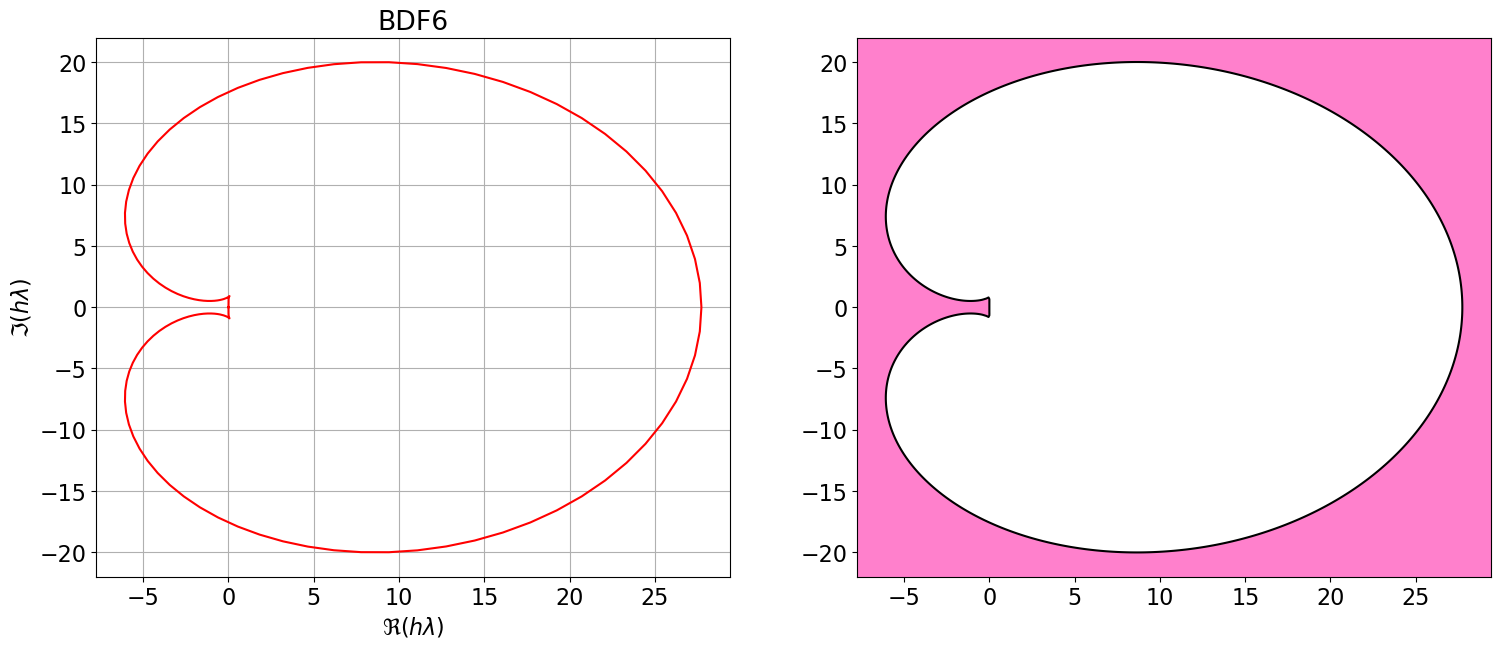
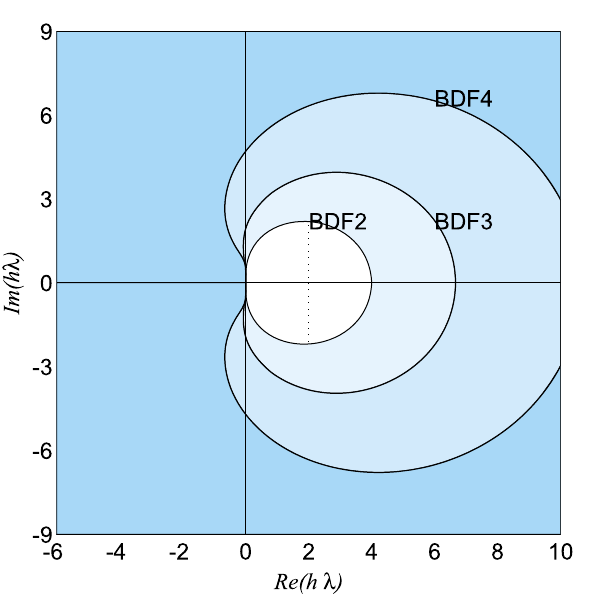
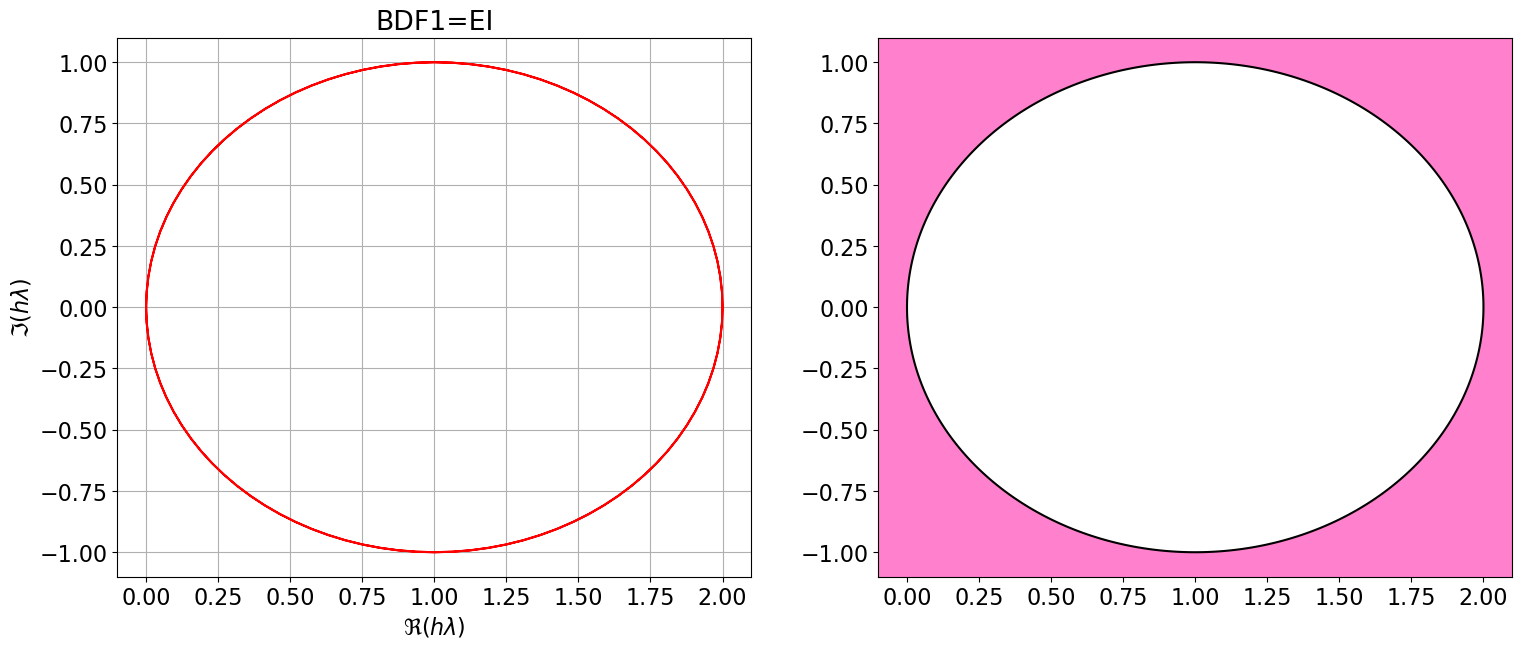
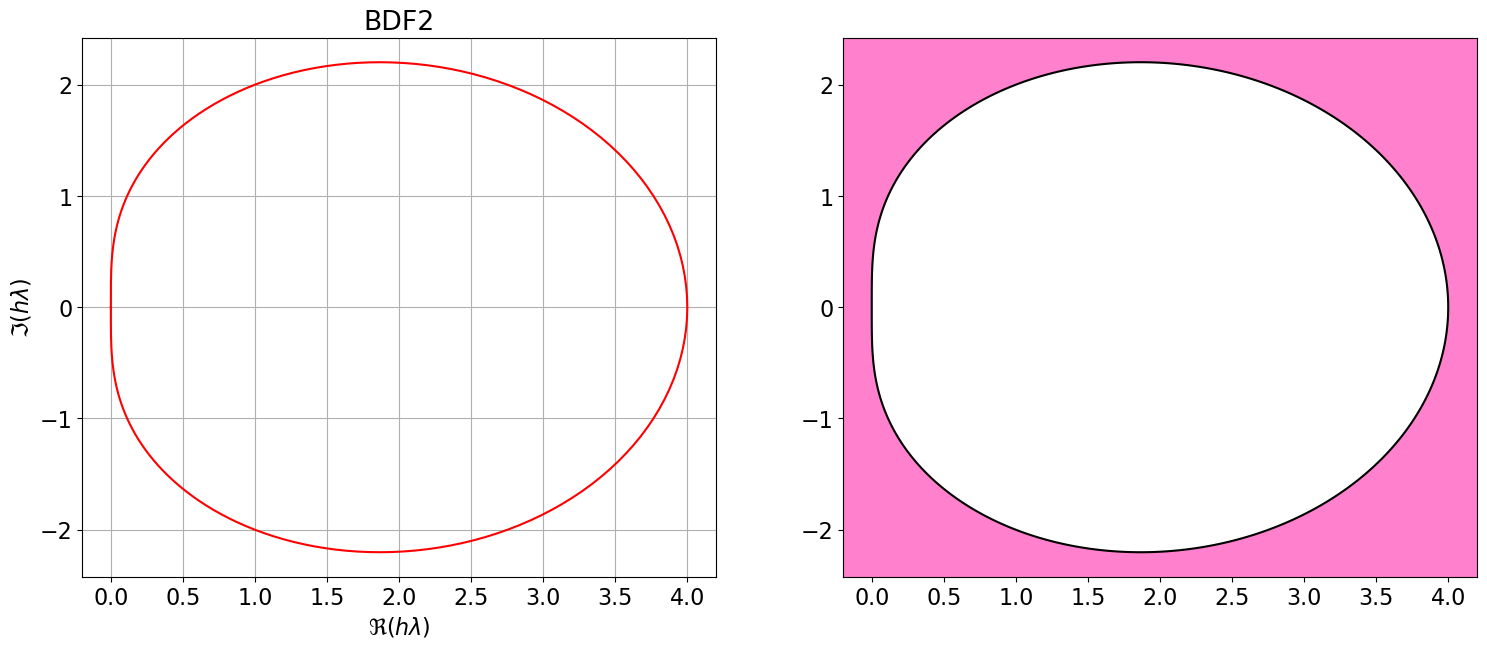
Régions de A-stabilité des méthodes BDF
L’illustration ci-dessous montre les régions de stabilité absolue des méthodes Backward Differentiation Formula (BDF) pour \(q \leq 4\) qui sont des schémas implicites.
Contrairement aux méthodes d’Adams :
- Les régions de stabilité des BDF sont conditionnellement A-stable sur \(\mathbb{C}\) mais incluent toujours l’axe réel négatif, ce qui leur confère une inconditionnelle A-stabilité sur \(\mathbb{R}\).
- Ces méthodes sont donc particulièrement adaptées aux problèmes nécessitant une intégration sur des intervalles de temps très longs, voire infinis.
- Elles sont aussi privilégiées pour la résolution des problèmes raides, car, avec un changement de variable, cela revient à résoudre un problème de Cauchy sur un intervalle de temps grand.
🔴 Proposition [condition des racines stricte et A-stabilité pour les schémas multipas linéaires ] :
Une méthode multipas linéaire est absolument stable si et seulement si son polynôme de A-stabilité satisfait (éventuellement sous certaines conditions sur \(h\)) la condition des racines strictes. Autrement dit, les racines du polynôme
\( p_z(r) = \varrho(r) - z \sigma(r) \)
doivent être strictement à l’intérieur du disque unité dans \(\mathbb{C}\) :
\( \exists h_0 > 0 \quad \text{tel que} \quad |r_j(z)| < 1, \quad \forall j = 0, \dots, p, \quad \forall h \leq h_0. \)
⚠ Deuxième barrière de Dahlquist : limitation sur \(h\)
En d’autres termes, le 🎅 n’existe pas :
🔎 Conséquences : augmenter le nombre de pas \(q\dots\)
Exemples : analyse de l’A-stabilité de quelques schémas
Cas particulier : Euler implicite (\(\text{AM}_0\))
\(
p(r) = (r - 1) - z r
\) La seule racine est \(r = \frac{1}{1 + z}\). La condition de stabilité est donc :
\(
\left\lvert \frac{1}{1 + z} \right\rvert < 1
\) Cette condition définit l’extérieur d’un disque de centre \((1,0)\) et de rayon \(1\).
Comme le demi-plan \(\Re(z) < 0\) est inclus dans cette région, la méthode est inconditionnellement A-stable.
Cas particulier : Crank-Nicolson (\(\text{AM}_1\))
\(
p(r) = (r - 1) - z \frac{1}{2} (r + 1)
\) Sa seule racine est :
\(
r = \frac{2 + z}{2 - z}
\) Pour la stabilité, on impose :
\(
\left\lvert \frac{2 + z}{2 - z} \right\rvert < 1
\) Ce qui revient à exiger \(\Re(z) < 0\).
Comme \(\mathbb{C}^-\) est entièrement inclus dans cette région, la méthode est inconditionnellement A-stable.
Pour les méthodes d’Euler explicite, Euler implicite et Cranck-Nicolson :
Il s’agit de trois méthodes à \(q=1\) pas, donc \(p=0\).
Commençons par l’étude de la convergence en étudiant la consistance (et son ordre) et la zéro-stabilité.
Selon la première barrière de Dahlquist, si la méthode est explicite l’ordre de convergence maximal est 2 (car \(q\) impair), si la méthode est explicite l’ordre maximal est 1. Pour pouvoir étudier l’ordre de consistance, commençons par afficher les \(\xi(i)\) pour \(i=0,1,2\) :
xi_cond(p=0, omega=2) Pour \(p=0\), on a une méthode à \(q=1\) pas et on affiche \(ξ(i)\) pour \(i=0,...,2\)
\(\xi(0) = a_{0}\)
\(\xi(1) = b_{0} + b_{-1}\)
\(\xi(2) = 2 b_{-1}\)
Résumons donc les quantités indiquées dans le tableau suivant :
\( \def\arraystretch{2.8} \begin{array}{|c|c|c|c|} \hline & \textbf{EE} & \textbf{EI} & \textbf{CN} \\ \hline \textbf{Méthode : } u_{n+1} = & u_n + h \varphi_n & u_n + h \varphi_{n+1} & u_n + \frac{h}{2} \big(\varphi_{n+1} + \varphi_n\big) \\ \hline \textbf{Coefficients : } p = 0 \text{ et } & a_0 = 1, b_{-1} = 0, b_0 = 1 & a_0 = 1, b_{-1} = 1, b_0 = 0 & a_0 = 1, b_{-1} = \frac{1}{2}, b_0 = \frac{1}{2} \\ \hline \textbf{Polynôme caractéristique : } \varrho & \varrho(r) = r - 1 & \varrho(r) = r - 1 & \varrho(r) = r - 1 \\ \hline \textbf{Racines : } & r_0 = 1 & r_0 = 1 & r_0 = 1 \\ \hline \textbf{Zéro-stabilité : } & \text{oui, } \lvert r_0 \rvert = 1 \text{ et mult. 1} & \text{oui, } \lvert r_0 \rvert = 1 \text{ et mult. 1} & \text{oui, } \lvert r_0 \rvert = 1 \text{ et mult. 1} \\ \hline \textbf{Consistance : } & \text{oui, } \xi(0) = 1, \xi(1) = 1 & \text{oui, } \xi(0) = 1, \xi(1) = 1 & \text{oui, } \xi(0) = 1, \xi(1) = 1 \\ \hline \textbf{Ordre maximal (Dahlquist) : } & \omega \le 1 & \omega \le 2 & \omega \le 2 \\ \hline \textbf{Ordre réel : } \omega & \omega = 1 & \omega = 1 \text{ car } \xi(2) = 2 \neq 1 & \omega = 2 \text{ car } \xi(2) = 1 \\ \hline \end{array} \)
Passons maintenant à l’étude de la A-stabilité. Pour cela, considérons le toy-model : soit \(\lambda\in\mathbb{C}\) un nombre complexe tel que \(\Re(\lambda)=-\beta<0\) et considérons le problème de Cauchy
\(\begin{cases} y'(t)=\lambda y(t), &\text{pour }t>0,\\ y(0)=1. \end{cases}\)
Posons \(z = \lambda h\) et calculons les racines du polynôme caractéristique \(p_z(r) = \varrho(r) - z \sigma(r)\) :
\( \def\arraystretch{2.8} \begin{array}{|c|c|c|c|} \hline & \textbf{EE} & \textbf{EI} & \textbf{CN} \\ \hline \textbf{Schéma appliqué au toy-model} & u_n = (1 + z)^n & u_n = \left(\frac{1}{1 + z}\right)^n & u_n = \left(\frac{2 + z}{2 - z}\right)^n \\ \hline \textbf{Condition pour } \lvert u_n \rvert \xrightarrow[n\to\infty]{}0 & \lvert 1 + z \rvert < 1 & \left\lvert \frac{1}{1 + z} \right\rvert < 1 & \left\lvert \frac{2 + z}{2 - z} \right\rvert < 1 \\ \hline \textbf{A-stabilité ?} & \textbf{Uniquement} \text{ si } -2 < |z| < 0 & \textbf{Oui} \text{ (car } \Re(\lambda) < 0\text{)} & \textbf{Oui} \text{ (car } \Re(\lambda) < 0\text{)} \\ \hline \end{array} \)
Conclusion :
Ordre : si on note
alors l’ordre du schéma predictor-corrector est donné par
\( \omega_{[PC]}=\min\Big\{\omega_{[C]},\omega_{[P]}+1\Big\} \)
Ainsi, pour obtenir une méthode d’ordre \(\omega\), on peut choisir un prédicteur d’ordre \(\omega-1\) et un correcteur d’ordre \(\omega\) (par exemple, deux méthodes d’Adam ayant le même nombre de pas).
Zéro-stabilité : on peut démontrer que la zéro-stabilité du prédicteur n’influe pas sur la zéro-stabilité de la méthode prédicteur-correcteur. Il est même possible d’utiliser un prédicteur instable.
A-stabilité : les méthodes predictor-corrector sont soumises à une condition de A-stabilité, qui est typiquement celle du prédicteur. Elles ne sont donc pas adaptées à la résolution de problèmes de Cauchy sur des intervalles non bornés ou de problèmes stiff.
On peut surmonter les limites imposées par les barrières de Dahlquist en combinant plusieurs méthodes multi-pas. Par exemple, les deux méthodes suivantes à trois pas
\( \begin{align*} u_{n+1} &= -\frac{8}{11}u_{n} + \frac{19}{11}u_{n-1} + \frac{h}{30} \big( 30\varphi_{n+1}+57\varphi_n+24\varphi_{n-1}-\varphi_{n-2} \big) \\ u_{n+1} &= \frac{449}{240}u_{n} - \frac{19}{30}u_{n-1} -\frac{361}{240}u_{n-2} + \frac{h}{720}\big(251\varphi_{n+1}+456\varphi_n-1347\varphi_{n-1}-350\varphi_{n-2}\big) \end{align*} \)
sont d’ordre cinq, mais sont instables. Cependant, en les combinant comme suit
\( u_{n+1} = \begin{cases} -\frac{8}{11}u_{n} + \frac{19}{11}u_{n-1} + \frac{h}{30} \big( 30\varphi_{n+1}+57\varphi_n+24\varphi_{n-1}-\varphi_{n-2} \big) &\text{si $n$ est pair}\\ \frac{449}{240}u_{n} - \frac{19}{30}u_{n-1} -\frac{361}{240}u_{n-2} + \frac{h}{720}\big(251\varphi_{n+1}+456\varphi_n-1347\varphi_{n-1}-350\varphi_{n-2}\big) &\text{sinon.} \end{cases} \)
on obtient une méthode A-stable à trois pas d’ordre cinq.
Posons \(z=h\lambda\). Il est en général difficile de déterminer la région de stabilité absolue car on doit décider pour quels \(z\in\mathbb{C}\) les racines du polynôme de stabilité vérifient la condition de racines stricte (i.e. \(|r| < 1\)). Il est plus aisé de déterminer la frontière de cette région car au moins une des racines de \(p\) à la frontière est de module \(1\). On a donc \(|r| = 1\) sur \(\partial A\). La frontière de \(A\) est alors un sous ensemble des points \(z\in\mathbb{C}\) pour lesquels \(r=e^{i\vartheta}\), \(\vartheta\in\mathbb{R}\). On remplace alors \(r =e^{i\vartheta}\) dans \(p\) et comme \(e^{i\vartheta}\) est racine, \(p(e^{i\vartheta}) = 0\) et on résoud l’équation. On obtient \(z = z(\vartheta)\) ce qui donne une courbe dans \(\mathbb{C}\) en fonction de l’angle \(\vartheta\), ce qui décrit donc une courbe polaire. Par conséquent, pour obtenir une représentation approchée de \(\partial A\), il suffit d’évaluer le second membre pour diverses valeurs de \(r\) sur le cercle unité, diverses valeurs de \(\vartheta\in\mathbb{R}\) et \(r=e^{i\vartheta}\).
def polyCar(schema):
sp.var('r z')
p,aa,bb,bm1=schema["p"],schema["aa"],schema["bb"],schema["bm1"]
rho = r**(p+1)-sum(aa[j]*r**(p-j)for j in range(p+1))
sigma = bm1*r**(p+1)+sum(bb[j]*r**(p-j)for j in range(p+1))
display(Math(r'\varrho(r)='+sp.latex(rho)))
display(Math(r'\sigma(r)='+sp.latex(sigma)))
def polyCarIMPL(schema):
sp.var('r z')
p,aa,bb,bm1=schema["p"],schema["aa"],schema["bb"],schema["bm1"]
rho=r**(p+1)-sum(aa[j]*r**(p-j)for j in range(p))
sigma=bm1*r**(p+1)+sum(bb[j]*r**(p-j)for j in range(p))
display(Math(r'\varrho(r)='+sp.latex(rho)))
display(Math(r'\sigma(r)='+sp.latex(sigma)))
## Returns > 1 if argument is not in region of absolute stability
def stabilityFunction(z,schema):
schema["aa"] = [float(a) for a in schema["aa"]]
schema["bb"] = [float(b) for b in schema["bb"]]
schema["bm1"] = float(schema["bm1"])
pol = np.array(schema["aa"])+z*np.array(schema["bb"])
pol = np.append([1-z*schema["bm1"]],-pol)
return max(abs(np.roots(pol)))
def Astabilite(schema):
schema["aa"] = [float(a) for a in schema["aa"]]
schema["bb"] = [float(b) for b in schema["bb"]]
schema["bm1"] = float(schema["bm1"])
p,aa,bb,bm1=schema["p"],schema["aa"],schema["bb"],schema["bm1"]
## cc liste de points sur le circle unitaire
rr = np.linspace(0,2*np.pi,201)
cc = np.cos(rr)+1j*np.sin(rr)
#### ff fonction vectorisée qui donne zz
ff = lambda cc,p,aa,bb,bm1 : (cc**(p+1)-np.polyval(aa,cc))/(bm1*cc**(p+1)+np.polyval(bb,cc))
zz = ff(cc,p,aa,bb,bm1)
plt.figure(figsize=(18,7))
plt.subplot(1,2,1)
plt.plot(zz.real,zz.imag,'r')
plt.grid(True)
## plt.axis('equal')
plt.xlabel(r'$\Re(h\lambda)$')
plt.ylabel(r'$\Im(h\lambda)$');
plt.title(schema["Nom"])
Lx,Ly = plt.xlim(),plt.ylim()
plt.subplot(1,2,2)
x = np.linspace(Lx[0],Lx[1], 300)
y = np.linspace(Ly[0],Ly[1], 300)
[X,Y] = np.meshgrid(x,y)
Z = np.zeros(X.shape)
for m in range(X.shape[0]):
for n in range(X.shape[1]):
Z[m,n] = stabilityFunction(X[m,n] + 1j * Y[m,n], schema)
plt.contour(X, Y, Z, [1], colors='k')
plt.contourf(X, Y, Z, [0,1], colors=[[1, 0.5, 0.8]])
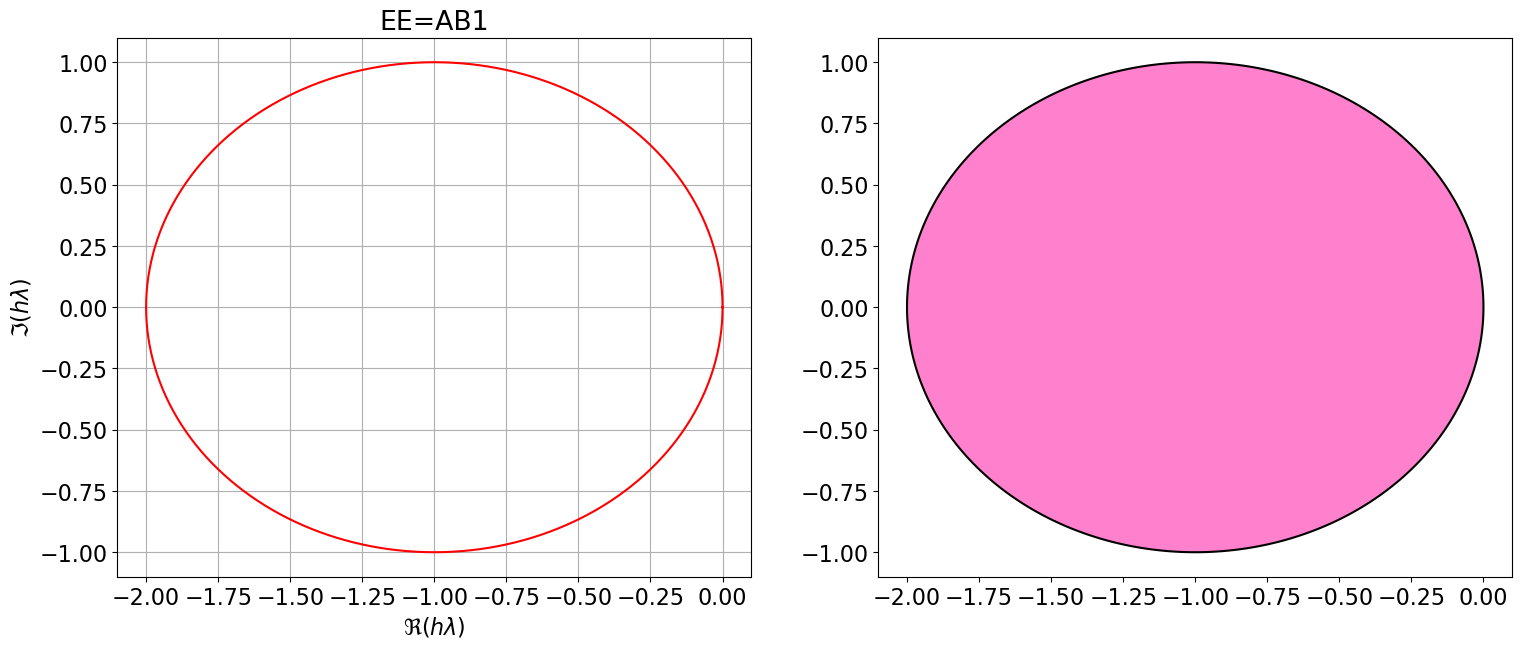
return NoneEE = { "Nom":"EE=AB1", "p":0, "aa":[1], "bb":[1], "bm1":0 }
polyCar(EE)
Astabilite(EE) \(\displaystyle \varrho(r)=r - 1\)
\(\displaystyle \sigma(r)=1\)
AB2 = { "Nom":"AB2", "p":1, "aa":[1,0], "bb":[sp.Rational(3,2),-sp.Rational(1,2)], "bm1":0 }
polyCar(AB2)
Astabilite(AB2)\(\displaystyle \varrho(r)=r^{2} - r\)
\(\displaystyle \sigma(r)=\frac{3 r}{2} - \frac{1}{2}\)
AB3 = { "Nom":"AB3", "p":2, "aa":[1,0,0], "bb":[sp.Rational(23,12),-sp.Rational(16,12), sp.Rational(5,12)], "bm1":0 }
polyCar(AB3)
Astabilite(AB3)\(\displaystyle \varrho(r)=r^{3} - r^{2}\)
\(\displaystyle \sigma(r)=\frac{23 r^{2}}{12} - \frac{4 r}{3} + \frac{5}{12}\)
AB4 = { "Nom":"AB4", "p":3, "aa":[1,0,0,0], "bb":[sp.Rational(55,24),-sp.Rational(59,24), sp.Rational(37,24), -sp.Rational(9,24)], "bm1":0 }
polyCar(AB4)
Astabilite(AB4)\(\displaystyle \varrho(r)=r^{4} - r^{3}\)
\(\displaystyle \sigma(r)=\frac{55 r^{3}}{24} - \frac{59 r^{2}}{24} + \frac{37 r}{24} - \frac{3}{8}\)
AB5 = { "Nom":"AB5", "p":4, "aa":[1,0,0,0,0], "bb":[sp.Rational(1901,720), -sp.Rational(1387,360), sp.Rational(109,30), -sp.Rational(637,360), sp.Rational(251,720)], "bm1":0 }
polyCar(AB5)
Astabilite(AB5)\(\displaystyle \varrho(r)=r^{5} - r^{4}\)
\(\displaystyle \sigma(r)=\frac{1901 r^{4}}{720} - \frac{1387 r^{3}}{360} + \frac{109 r^{2}}{30} - \frac{637 r}{360} + \frac{251}{720}\)
AM0 = { "Nom":"AM0=EI", "p":0, "aa":[1], "bb":[0], "bm1": 1 }
polyCarIMPL(AM0)
##Astabilite(AM0)\(\displaystyle \varrho(r)=r\)
\(\displaystyle \sigma(r)=r\)
AM1 = { "Nom":"AM1=CN", "p":1, "aa":[1], "bb":[sp.Rational(1,2)], "bm1": sp.Rational(1,2) }
polyCarIMPL(AM1)
##Astabilite(AM1)\(\displaystyle \varrho(r)=r^{2} - r\)
\(\displaystyle \sigma(r)=\frac{r^{2}}{2} + \frac{r}{2}\)
AM2 = { "Nom":"AM2", "p":1, "aa":[1,0], "bb":[sp.Rational(8,12),-sp.Rational(1,12)], "bm1":sp.Rational(5,12) }
polyCar(AM2)
Astabilite(AM2)\(\displaystyle \varrho(r)=r^{2} - r\)
\(\displaystyle \sigma(r)=\frac{5 r^{2}}{12} + \frac{2 r}{3} - \frac{1}{12}\)
AM3 = { "Nom":"AM3", "p":2, "aa":[1,0,0], "bb":[sp.Rational(19,24),-sp.Rational(5,24),sp.Rational(1,24)], "bm1":sp.Rational(9,24) }
polyCar(AM3)
Astabilite(AM3)\(\displaystyle \varrho(r)=r^{3} - r^{2}\)
\(\displaystyle \sigma(r)=\frac{3 r^{3}}{8} + \frac{19 r^{2}}{24} - \frac{5 r}{24} + \frac{1}{24}\)
AM4 = { "Nom":"AM4", "p":3, "aa":[1,0,0,0], "bb":[sp.Rational(646,720), sp.Rational(-264,720), sp.Rational(106,720), sp.Rational(-19,720)], "bm1":sp.Rational(251,720) }
polyCar(AM4)
Astabilite(AM4)\(\displaystyle \varrho(r)=r^{4} - r^{3}\)
\(\displaystyle \sigma(r)=\frac{251 r^{4}}{720} + \frac{323 r^{3}}{360} - \frac{11 r^{2}}{30} + \frac{53 r}{360} - \frac{19}{720}\)
MS2 = { "Nom":"MS2", "p":1, "aa":[0,1], "bb":[sp.Rational(4,3),sp.Rational(1,3)], "bm1":sp.Rational(1,3) }
polyCar(MS2)
##Astabilite(MS2)\(\displaystyle \varrho(r)=r^{2} - 1\)
\(\displaystyle \sigma(r)=\frac{r^{2}}{3} + \frac{4 r}{3} + \frac{1}{3}\)
BDF1 = { "Nom":"BDF1=EI", "p":1, "aa":[1], "bb":[0], "bm1":1 }
polyCarIMPL(BDF1)
Astabilite(BDF1)\(\displaystyle \varrho(r)=r^{2} - r\)
\(\displaystyle \sigma(r)=r^{2}\)
BDF2 = { "Nom":"BDF2", "p":1, "aa":[sp.Rational(4,3),-sp.Rational(1,3)], "bb":[0], "bm1":sp.Rational(2,3) }
polyCarIMPL(BDF2)
Astabilite(BDF2)\(\displaystyle \varrho(r)=r^{2} - \frac{4 r}{3}\)
\(\displaystyle \sigma(r)=\frac{2 r^{2}}{3}\)
BDF3 = { "Nom":"BDF3", "p":2, "aa":[sp.Rational(18,11),-sp.Rational(9,11),sp.Rational(2,11)], "bb":[0], "bm1":sp.Rational(6,11) }
##polyCarIMPL(BDF3)
Astabilite(BDF3)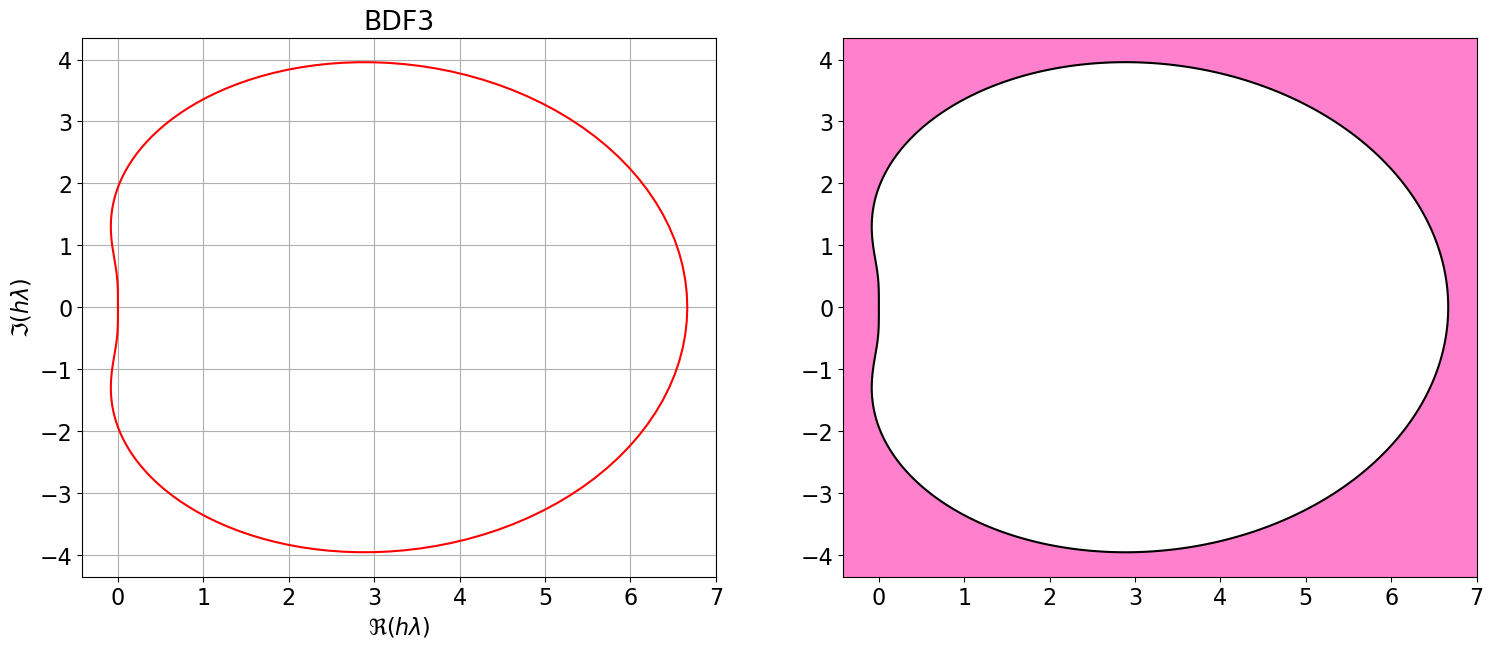
BDF4 = { "Nom":"BDF4", "p":3, "aa":[sp.Rational(48,25),-sp.Rational(36,25),sp.Rational(16,25),-sp.Rational(3,25)], "bb":[0], "bm1":sp.Rational(12,25) }
## polyCarIMPL(BDF4)
Astabilite(BDF4)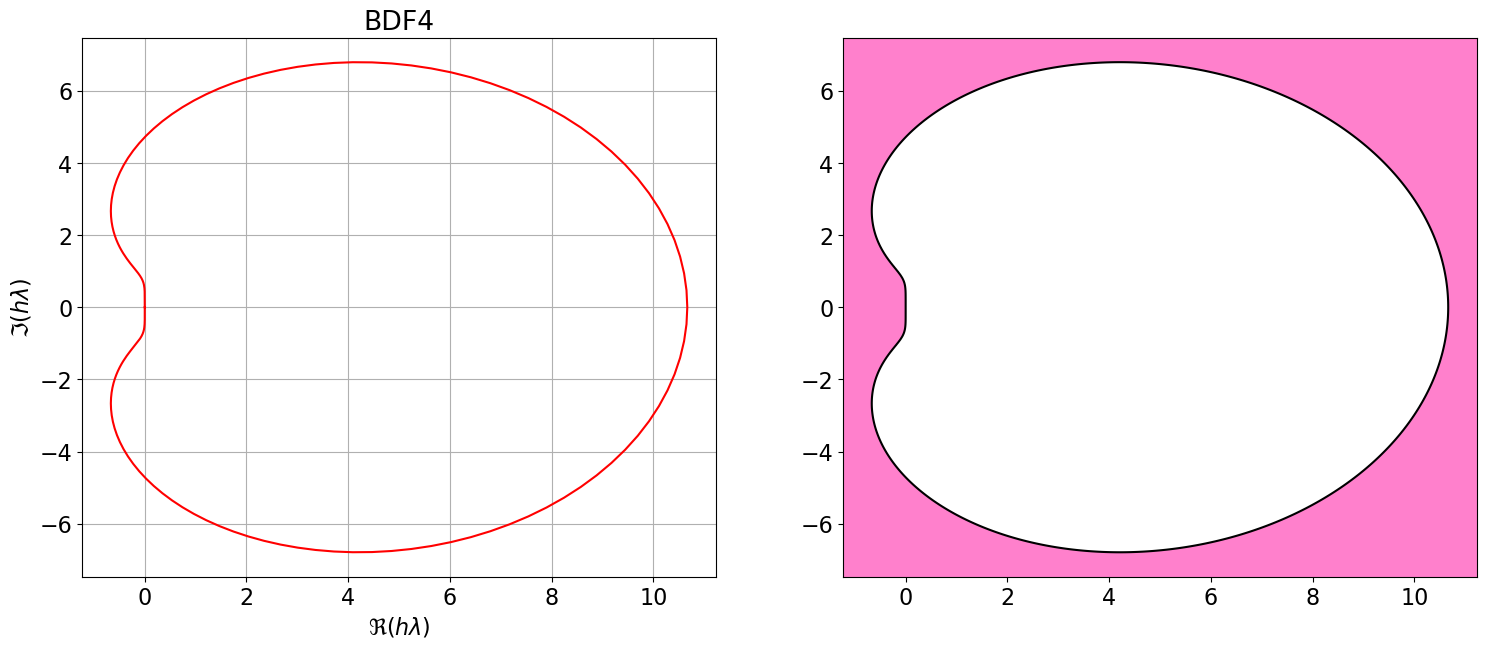
BDF5 = { "Nom":"BDF5", "p":4, "aa":[sp.Rational(300,137),-sp.Rational(300,137),sp.Rational(200,137),-sp.Rational(75,137),sp.Rational(12,137)], "bb":[0], "bm1":sp.Rational(60,137) }
## polyCar(BDF5)
Astabilite(BDF5)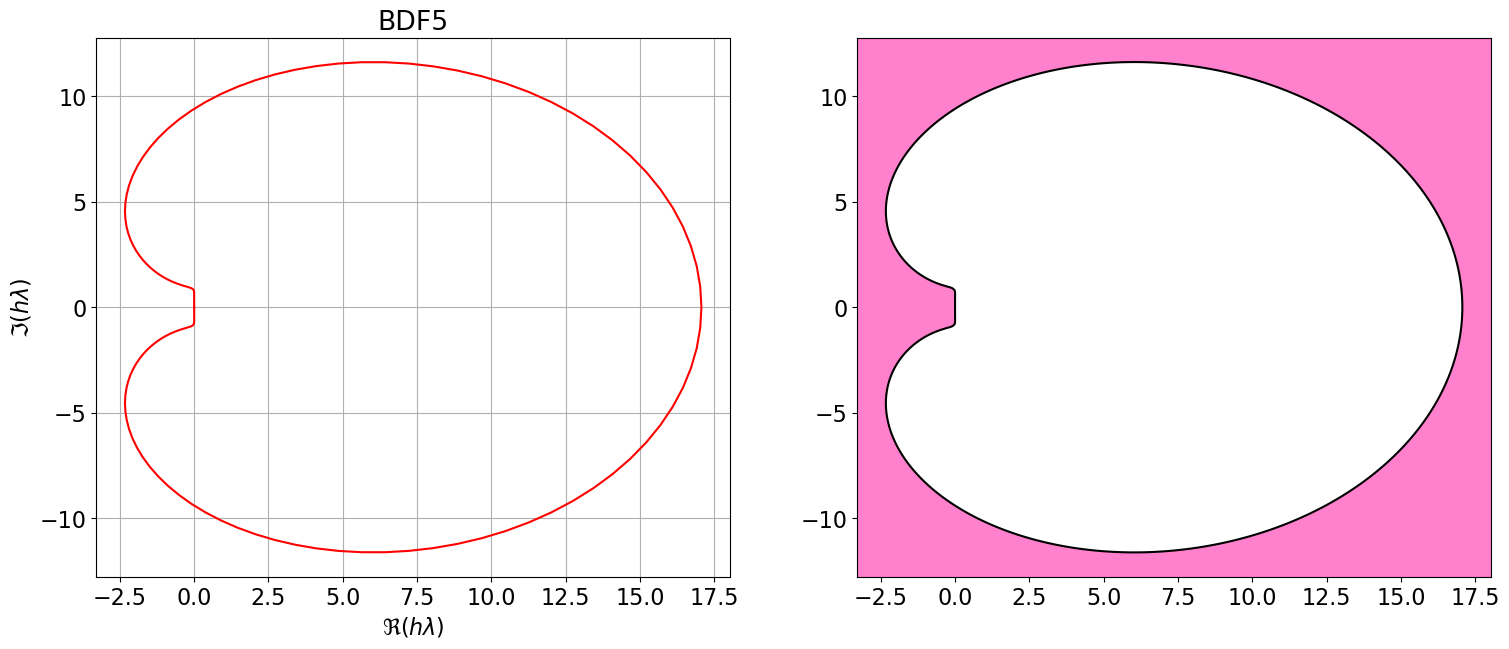
BDF6 = { "Nom":"BDF6", "p":5, "aa":[sp.Rational(120,49),-sp.Rational(150,49),sp.Rational(400,147),-sp.Rational(75,49),sp.Rational(24,49),-sp.Rational(10,147)], "bb":[0], "bm1":sp.Rational(20,49) }
## polyCar(BDF6)
Astabilite(BDF6)