Code
import numpy as np
import matplotlib.pyplot as plt
import sympy as sp
from IPython.display import display, Markdown, Mathimport numpy as np
import matplotlib.pyplot as plt
import sympy as sp
from IPython.display import display, Markdown, MathSoit le schéma de Runge-Kutta dont la matrice de Butcher est \( \begin{array}{c|cc} 0 & 0 & 0\\ \alpha & \alpha & 0\\ \hline & \frac{2\alpha-1}{2\alpha} & \frac{1}{2\alpha} \end{array} \)
Remarque : chaque sujet correspond à une valeur de \(\alpha\) choisie parmi les suivantes : \( \left\{\frac{1}{6},\frac{1}{4},\frac{1}{3},\frac{5}{12},\frac{7}{12},\frac{2}{3},\frac{3}{4},\frac{5}{6},\frac{11}{12}\right\} \)
ALPHA = [sp.Rational(2,12), sp.Rational(3,12), sp.Rational(4,12), sp.Rational(5,12),
sp.Rational(7,12), sp.Rational(8,12), sp.Rational(9,12), sp.Rational(10,12), sp.Rational(11,12)]
for alpha in ALPHA:
display(Markdown(f"\(c_2 = a_{{21}} = {sp.latex(alpha)} \\qquad b_1={sp.latex(1-sp.Rational(1,2*alpha))} \\qquad b_2={sp.latex(sp.Rational(1,2*alpha))}\)"))\(c_2 = a_{21} = \frac{1}{6} \qquad b_1=-2 \qquad b_2=3\)
\(c_2 = a_{21} = \frac{1}{4} \qquad b_1=-1 \qquad b_2=2\)
\(c_2 = a_{21} = \frac{1}{3} \qquad b_1=- \frac{1}{2} \qquad b_2=\frac{3}{2}\)
\(c_2 = a_{21} = \frac{5}{12} \qquad b_1=- \frac{1}{5} \qquad b_2=\frac{6}{5}\)
\(c_2 = a_{21} = \frac{7}{12} \qquad b_1=\frac{1}{7} \qquad b_2=\frac{6}{7}\)
\(c_2 = a_{21} = \frac{2}{3} \qquad b_1=\frac{1}{4} \qquad b_2=\frac{3}{4}\)
\(c_2 = a_{21} = \frac{3}{4} \qquad b_1=\frac{1}{3} \qquad b_2=\frac{2}{3}\)
\(c_2 = a_{21} = \frac{5}{6} \qquad b_1=\frac{2}{5} \qquad b_2=\frac{3}{5}\)
\(c_2 = a_{21} = \frac{11}{12} \qquad b_1=\frac{5}{11} \qquad b_2=\frac{6}{11}\)
Considérons le problème de Cauchy
trouver une fonction \(y \colon I\subset \mathbb{R} \to \mathbb{R}\) définie sur un intervalle \(I=[t_0,T]\) telle que \(\begin{cases} y'(t) = \varphi(t,y(t)), &\forall t \in I=[t_0,T],\\ y(t_0) = y_0, \end{cases}\) avec \(y_0\) une valeur donnée et supposons que l’on ait montré l’existence et l’unicité d’une solution \(y\) pour \(t\in I\).
Pour \(h>0\) soit \(t_n\stackrel{\text{déf.}}{=} t_0+nh\) avec \(n=0,1,2,\dots,N\) une suite de \(N+1\) nœuds de \(I\) induisant une discrétisation de \(I\) en \(N\) sous-intervalles \(I_n=[t_n;t_{n+1}]\) chacun de longueur \(h>0\) (appelé le pas de discrétisation).
Pour chaque nœud \(t_n\), on cherche la valeur inconnue \(u_n\) qui approche la valeur exacte \(y_n\equiv y(t_n)\).
Le schéma qu’on va construire permet de calculer explicitement \(u_{n+1}\) à partir de \(u_n\) et il est donc possible de calculer successivement \(u_1\), \(u_2\),…, en partant de \(u_0\) par la formule de récurrence \(\begin{cases} u_0 = y_0 \\ K_1 = \varphi\left(t_n,u_n\right)\\ K_2 = \varphi\left(t_n+\alpha h,u_n+\alpha hK_1\right)\\ u_{n+1} = u_n + \frac{h}{2\alpha} \left((2\alpha-1)K_1+K_2\right) & n=0,1,\dots N-1 \end{cases}\)
Définition de A-stabilité
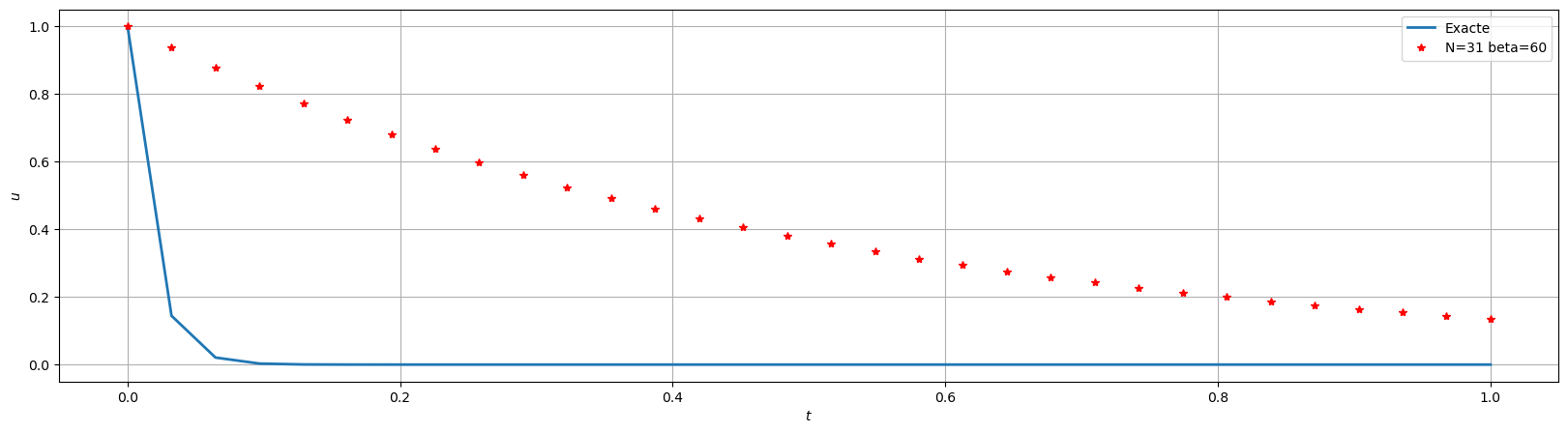
Soit \(\beta>0\) un nombre réel positif et considérons le problème de Cauchy \(\begin{cases} y'(t)=-\beta y(t), &\text{pour }t>0,\\ y(0)=y_0 \end{cases}\) où \(y_0\neq0\) est une valeur donnée. Sa solution est \(y(t)=y_0e^{-\beta t}\) donc \(\lim_{t\to+\infty}y(t)=0.\)
Si, sous d’éventuelles conditions sur \(h\), on a \( \lim_{n\to+\infty} u_n =0, \) alors on dit que le schéma est A-stable.
Le schéma donné appliqué à cette équation devient
h = sp.symbols('h')
Alpha = sp.symbols(r'\Alpha')
beta = sp.symbols(r'\beta')
u_n = sp.symbols('u_n')
u_np1 = sp.symbols('u_{n+1}')
Phi = lambda y : -beta*y
K_1 = Phi(u_n)
display(sp.Eq(sp.Symbol('K_1'), K_1))
K_2 = Phi(u_n+Alpha*h*K_1)
display(sp.Eq(sp.Symbol('K_2'), K_2.expand().factor(u_n)))
display(sp.Eq(u_np1,(u_n+h/(2*Alpha)*((2*Alpha-1)*K_1+K_2 )).factor()))\(\displaystyle K_{1} = - \beta u_{n}\)
\(\displaystyle K_{2} = \beta u_{n} \left(\Alpha \beta h - 1\right)\)
\(\displaystyle u_{n+1} = \frac{u_{n} \left(\beta^{2} h^{2} - 2 \beta h + 2\right)}{2}\)
c’est-à-dire \(\begin{cases} u_0 = y_0 \\ u_{n+1} = \dfrac{2 - 2(\beta h) + (\beta h)^2}{2}u_n & n=0,1,\dots N-1 \end{cases}\) Par induction on obtient \( u_{n}=\left(1 - (\beta h) + \frac{1}{2}(\beta h)^2 \right)^nu_0. \) Notons que \(u_n\) ne dépend pas du choix de \(\alpha\).
Étant une suite géométrique, \(\lim\limits_{n\to+\infty}u_n=0\) si et seulement si \( \left|1 - (\beta h) + \frac{1}{2}(\beta h)^2\right|<1. \) Notons \(x\) le produit \(\beta h\) et \(q\) le polynôme \(q(x)=\frac{1}{2}x^2-x+1\).
# from sympy.plotting import plot
x = sp.symbols('x', positive=True)
q = 1 - 1*x + x**2/2
display(Markdown(f"\(q(x)={sp.latex(q)}\)"))
display(Markdown("Calculons les valeurs de $x$ pour lesquelles $|q(x)|<1$:"))
display(sp.solve(sp.Abs(q)<1))
display(Markdown("Calculons la dérivée de $q$ pour trouver les extremums locaux:"))
dq = sp.diff(q,x)
display(sp.Eq(sp.Symbol("q'(x)"), dq))
display(Markdown("Calculons les valeurs de $x$ pour lesquelles $q'(x)=0$:"))
x_sommet = sp.solve(dq)[0]
display(x_sommet)
display(Markdown("Calculons la valeur de $q$ au sommet:"))
y_sommet=q.subs(x,x_sommet)
display(y_sommet)
display(Markdown("Comme $y_{sommet}=q(x_{sommet})>0$, on en déduit que $q(x)>0$ pour tout $x$ et que $q(x)<1$ ssi $x<2x_{sommet}$:"))
display(Markdown(f"ainsi $q(x)>0$ pour tout $x$ et $q(x)<1$ ssi $x<{sp.latex(2*x_sommet)}$"))
sp.plot(q,1,-1,(x,0,x_sommet*2));\(q(x)=\frac{x^{2}}{2} - x + 1\)
Calculons les valeurs de \(x\) pour lesquelles \(|q(x)|<1\):
\(\displaystyle x < 2\)
Calculons la dérivée de \(q\) pour trouver les extremums locaux:
\(\displaystyle q'(x) = x - 1\)
Calculons les valeurs de \(x\) pour lesquelles \(q'(x)=0\):
\(\displaystyle 1\)
Calculons la valeur de \(q\) au sommet:
\(\displaystyle \frac{1}{2}\)
Comme \(y_{sommet}=q(x_{sommet})>0\), on en déduit que \(q(x)>0\) pour tout \(x\) et que \(q(x)<1\) ssi \(x<2x_{sommet}\):
ainsi \(q(x)>0\) pour tout \(x\) et \(q(x)<1\) ssi \(x<2\)
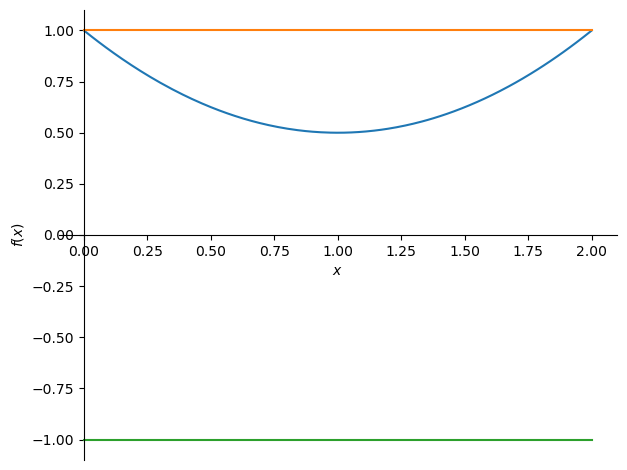
Il s’agit de la parabole convexe de sommet \(\left(1,\frac{1}{2}\right)\).
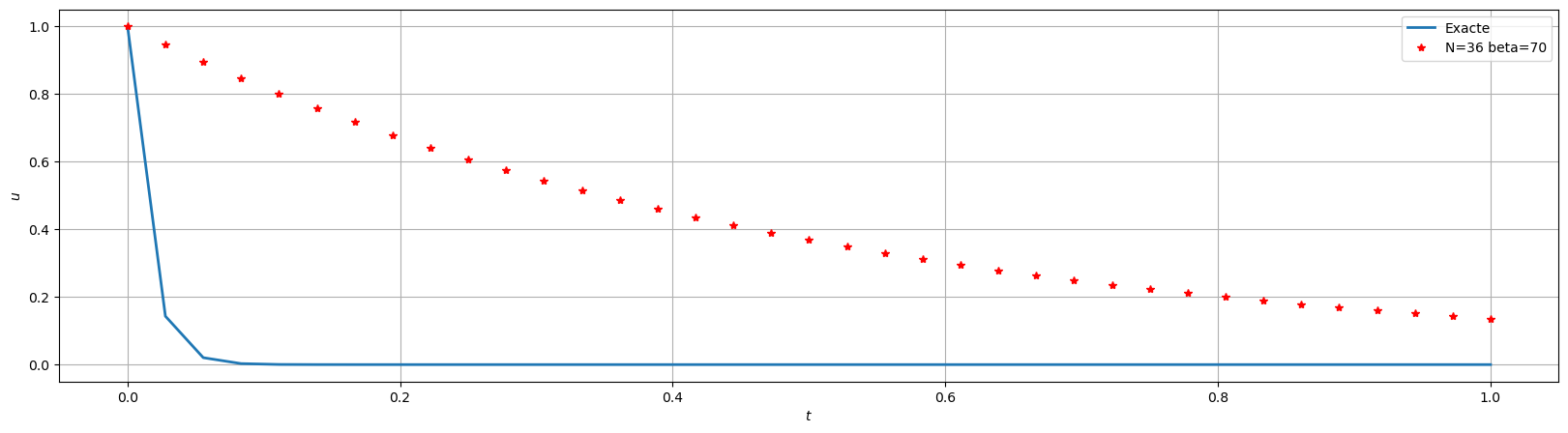
Nous avons \(|q(x)|<1\) si et seulement si \(x<2\). La relation \(\lim\limits_{n\to+\infty}u_n=0\) est donc satisfaite si et seulement si \(
h <\frac{2}{\beta}.
\) Cette condition de stabilité limite le pas \(h\) d’avance en \(t\) lorsqu’on utilise le schéma.
Nous avons \(q(x)>0\) pour tout \(x\) donc cette convergence est monotone.
\(h<\frac{2}{\beta}\) sur l’intervalle \([0;1]\) impose \(N>\frac{\beta}{2}\).
def RKalpha(phi,tt,y0):
h = tt[1]-tt[0]
uu = [y0]
for i in range(len(tt)-1):
k1 = phi( tt[i], uu[i] )
k2 = phi( tt[i]+h*alpha , uu[i]+h*alpha*k1 )
uu.append( uu[i] + h*((2*alpha-1)*k1+k2 )/(2*alpha))
return uuBETA = np.arange(50,101,10)
t0, y0, tfinal = 0, 1, 1
sol_exacte = lambda t : y0*np.exp(-beta*t)
phi = lambda t,y : -beta*y
i = 0
for beta in BETA:
N=(int(beta/2)+1)
tt = np.linspace(t0,tfinal,N+1)
yy = [sol_exacte(t) for t in tt]
alpha=ALPHA[0]
uu = RKalpha(phi,tt,y0)
i+=1
plt.figure(i,figsize=(20,5))
plt.plot(tt,yy,lw=2,label=("Exacte"))
plt.plot(tt,uu,'r*',label=("N="+str(N)+" beta="+str(beta)))
plt.xlabel('$t$')
plt.ylabel('$u$')
plt.legend()
plt.grid(True)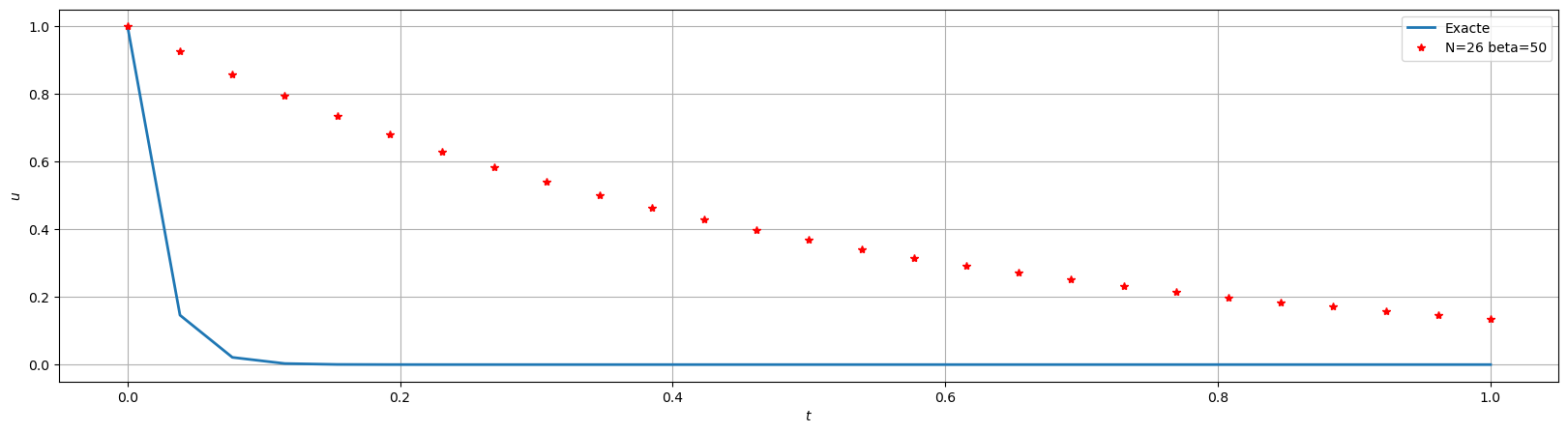
for alpha in ALPHA:
print("alpha = ",alpha)
c = [0,alpha]
b = [1-1/(2*alpha),1/(2*alpha)]
A = [[0,0],[alpha,0]]
s = len(c)
ordre = []
ordre.append(sum(b)==1)
for i in range(s):
ordre.append(sum(A[i])==c[i])
ordre.append(sum([b[i]*c[i] for i in range(s)])==sp.Rational(1,2))
print(set(ordre))
print("---------------------")alpha = 1/6
{True}
---------------------
alpha = 1/4
{True}
---------------------
alpha = 1/3
{True}
---------------------
alpha = 5/12
{True}
---------------------
alpha = 7/12
{True}
---------------------
alpha = 2/3
{True}
---------------------
alpha = 3/4
{True}
---------------------
alpha = 5/6
{True}
---------------------
alpha = 11/12
{True}
---------------------On peut soit calculer la solution “à la main” soit utiliser sympy.
Il s’agit d’une EDO à variables séparables. La fonction \(y(t)=0\) pour tout \(t\) est solution de l’EDO mais elle ne vérifie pas la CI. Toute autre solution de l’EDO sera non nulle et se trouve formellement comme suit: \( y'(t)=-2ty^2(t) \quad\implies\quad \frac{y'(t)}{y^2(t)}=-2t \quad\implies\quad \int y^{-2}\mathrm{d}y=-2\int t\mathrm{d}t \quad\implies\quad y(t)=\frac{1}{t^2+c}, \ c\in\mathbb{R}. \) En imposant la CI on obtient \(2=1/C\) d’où l’unique solution du problème de Cauchy: \(y(t)=\frac{2}{2t^2+1}\).
t = sp.symbols('t')
u = sp.Function('u')
edo = sp.Eq(sp.diff(u(t),t),-2*t*(u(t))**2)
display(edo)
t0 = 0
u0 = 2
IC = sp.Eq(u(t0),u0)
display(IC)
sol = sp.dsolve(edo,u(t),ics={u(t0):u0})
print('Solution :')
display(sol)
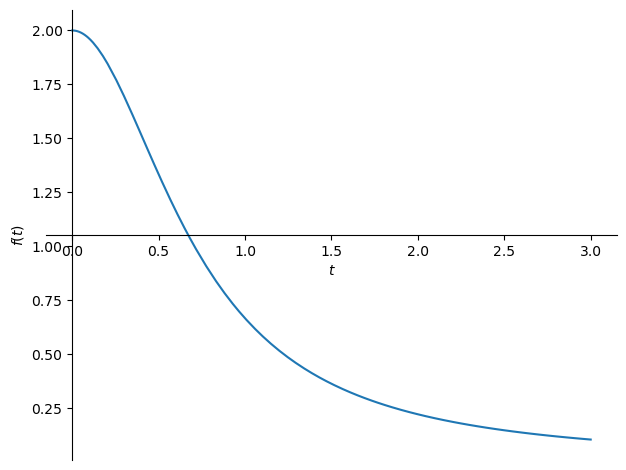
sp.plot(sol.rhs,(t,0,3))
sol_exacte = sp.lambdify(t,sol.rhs, 'numpy')
\(\displaystyle \frac{d}{d t} u{\left(t \right)} = - 2 t u^{2}{\left(t \right)}\)
\(\displaystyle u{\left(0 \right)} = 2\)
Solution :\(\displaystyle u{\left(t \right)} = \frac{1}{t^{2} + \frac{1}{2}}\)
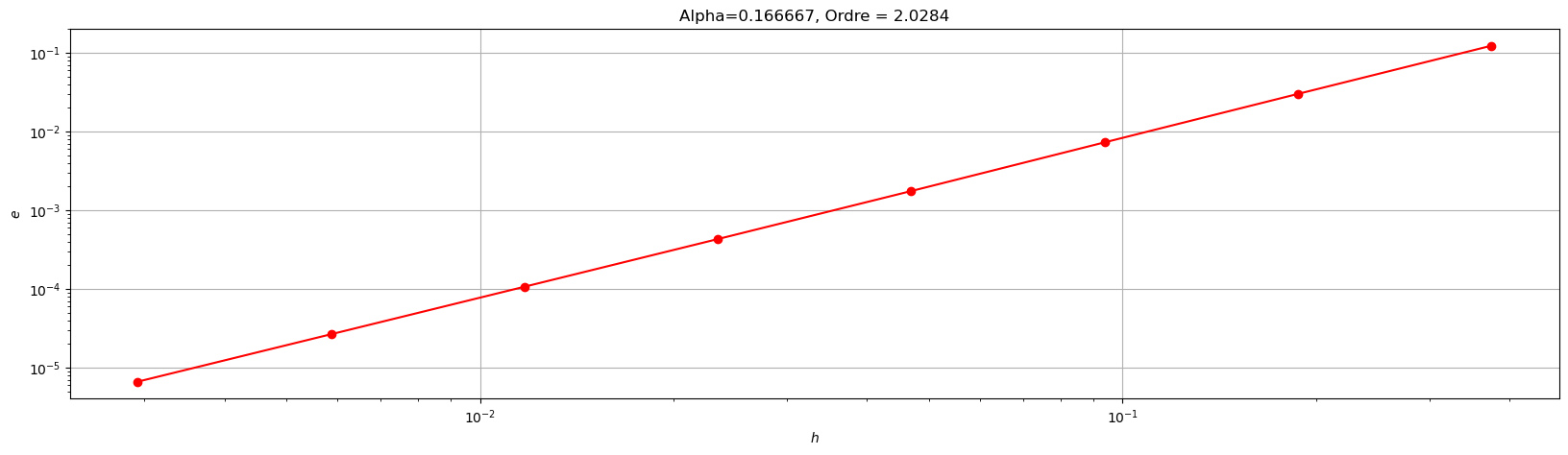
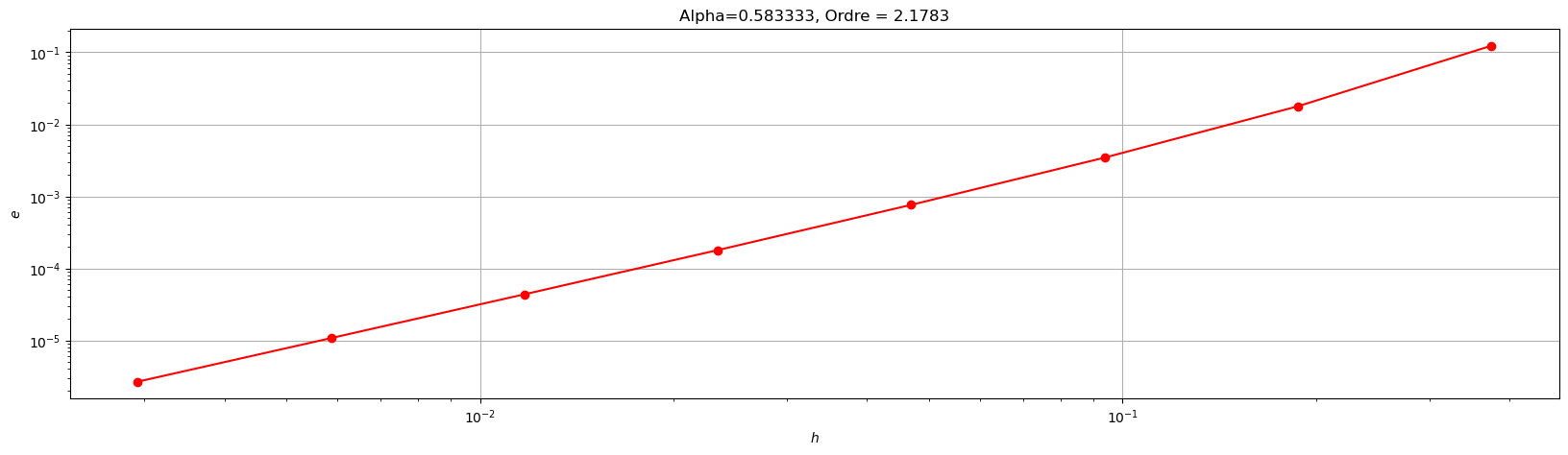
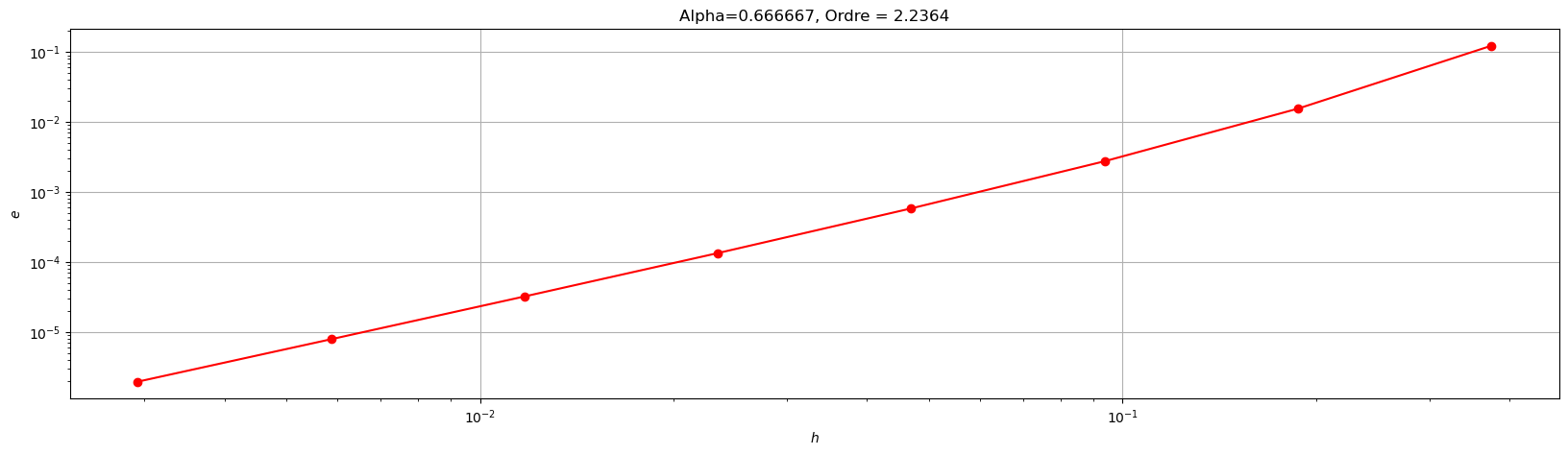
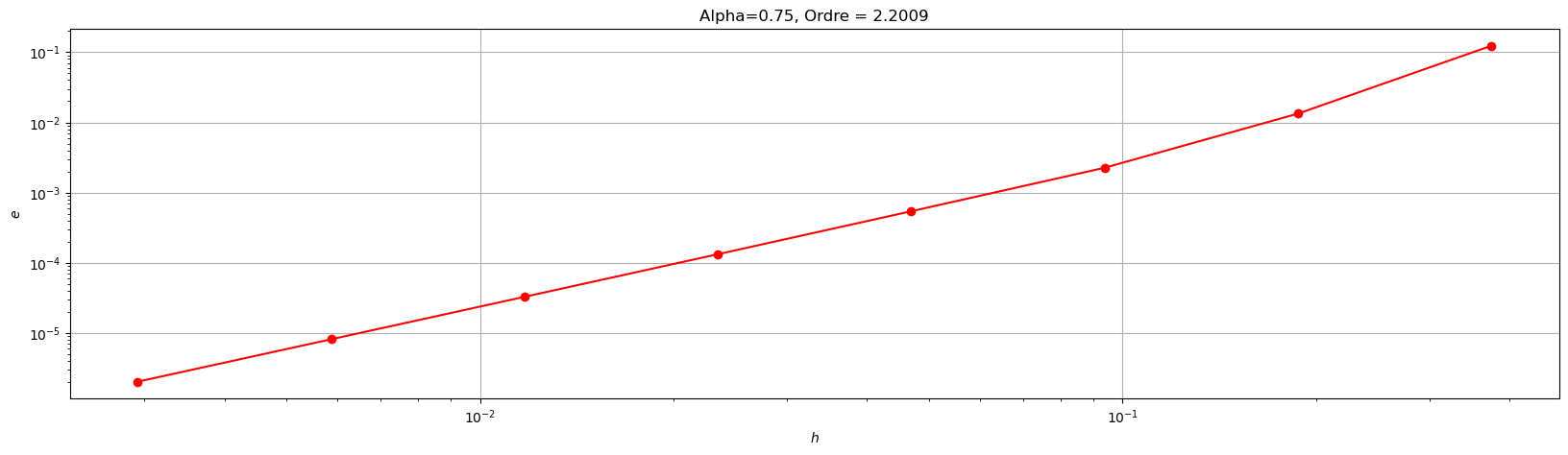
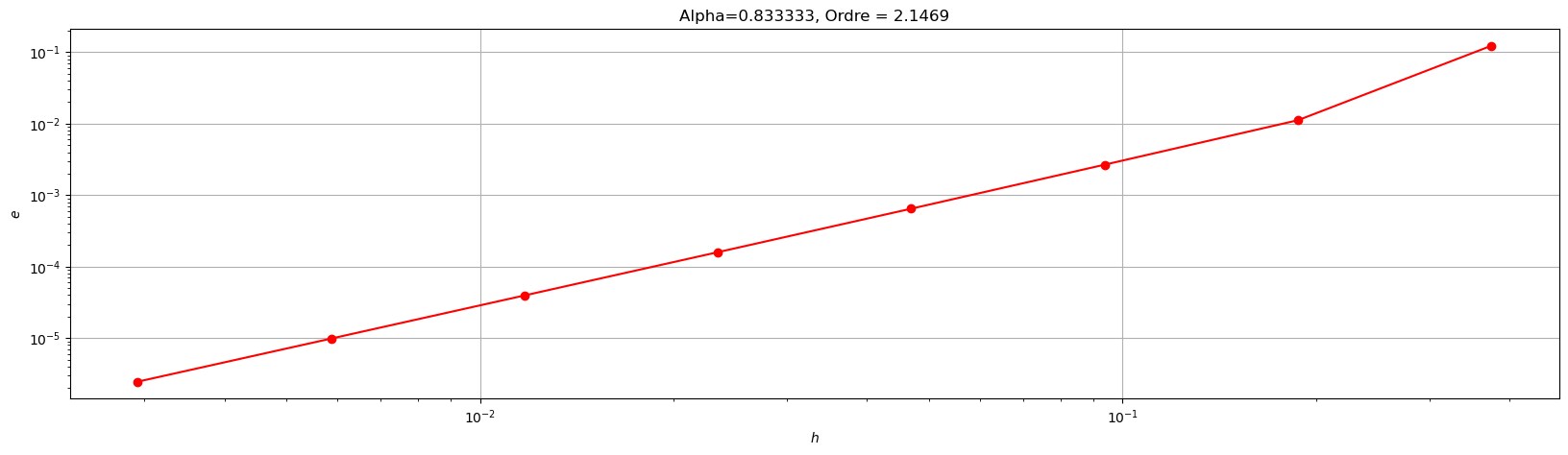
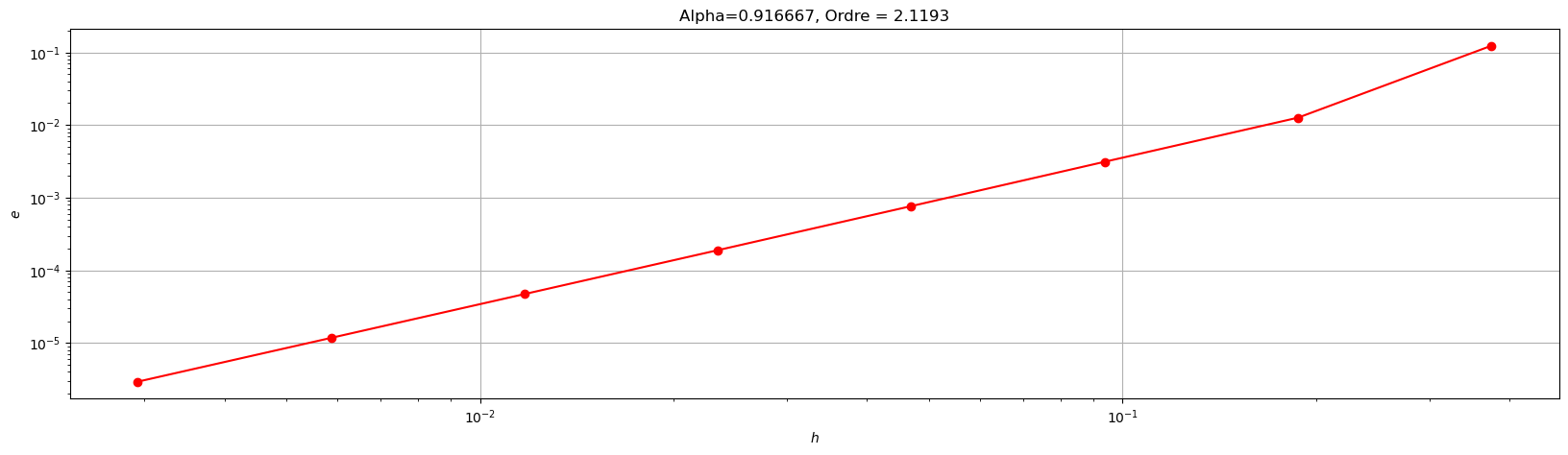
On calcule la solution approchée avec différentes valeurs de \(h_k=1/N_k\), à savoir \(N_k=2^3\), … \(2^{10}\). On sauvegarde les valeurs de \(h_k\) dans le vecteur H.
Pour chaque valeur de \(h_k\), on calcule le maximum de la valeur absolue de l’erreur et on sauvegarde toutes ces erreurs dans le vecteur err de sort que err[k] contient \(e_k=\max_{i=0,...,N_k}|y(t_i)-u_{i}|\) avec \(N_k=2^{k+1}\).
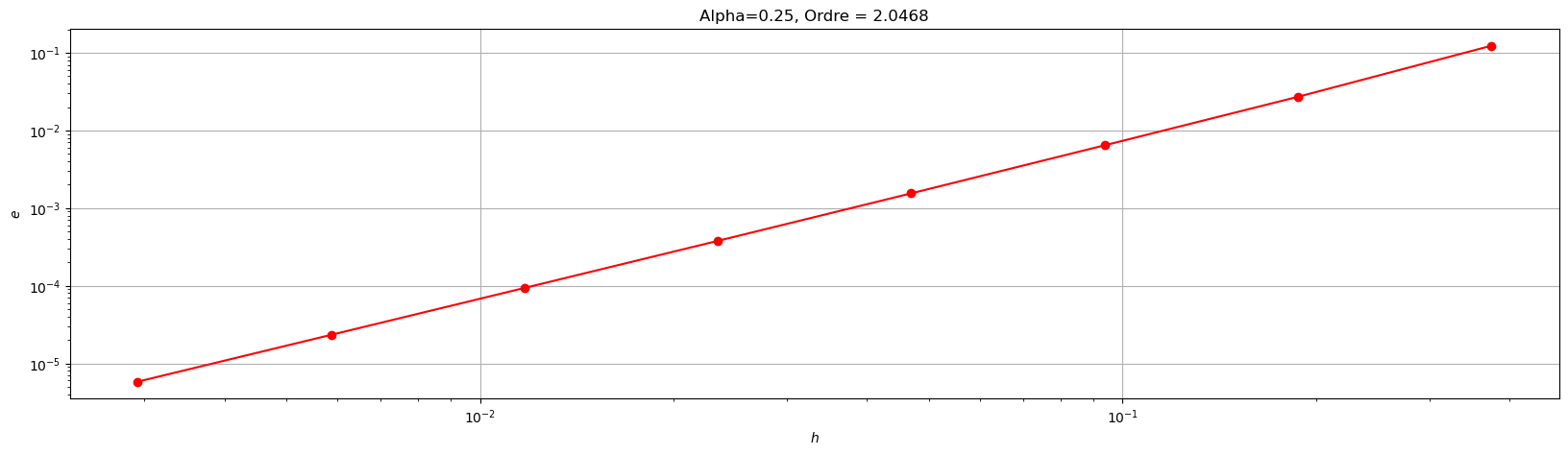
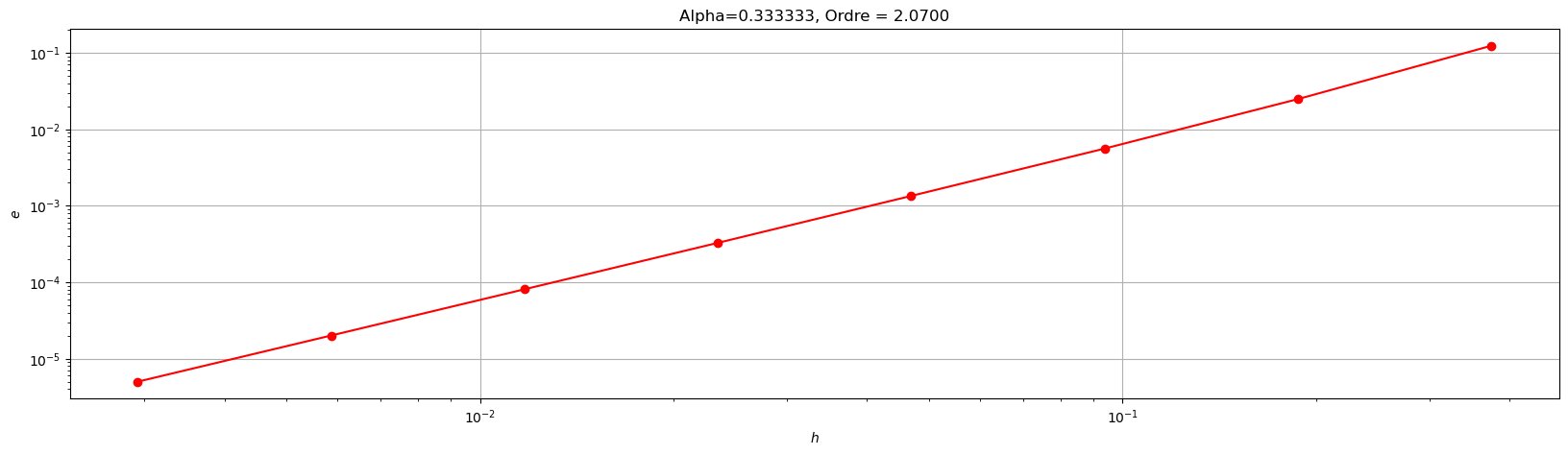
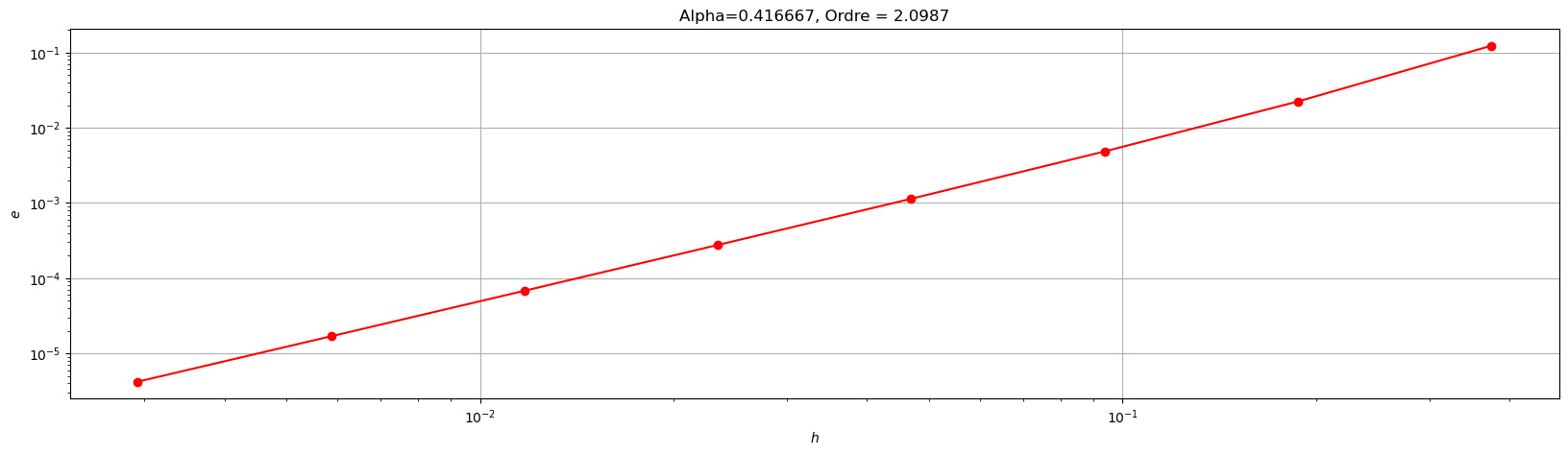
Pour afficher l’ordre de convergence on utilise une échelle logarithmique : on représente \(\ln(h)\) sur l’axe des abscisses et \(\ln(\text{err})\) sur l’axe des ordonnées ainsi, si \(\text{err}=Ch^p\), alors \(\ln(\text{err})=\ln(C)+p\ln(h)\). En échelle logarithmique, \(p\) représente donc la pente de la ligne droite \(\ln(\text{err})\).
Pour estimer l’ordre de convergence on estime la pente de la droite qui relie l’erreur au pas \(k\) à l’erreur au pas \(k+1\) en echelle logarithmique en utilisant la fonction polyfit basée sur la régression linéaire.
t0, y0, tfinal = 0, 2, 3
phi = lambda t,y : -2*t*y**2
i = 0
for alpha in ALPHA:
alpha = float(alpha)
HH = []
err = []
for k in range(8):
N = 2**(k+3)
tt = np.linspace(t0,tfinal,N+1)
HH.append( tt[1]-tt[0] )
yy = sol_exacte(tt)
uu = RKalpha(phi,tt,y0)
err.append(np.linalg.norm(uu-yy, np.inf))
i += 1
plt.figure(i,figsize=(20,5))
plt.loglog(HH,err, 'r-o')
pente = np.polyfit(np.log(HH), np.log(err), 1)[0]
plt.title(f'Alpha={alpha:g}, Ordre = {pente:.4f}')
plt.xlabel('$h$')
plt.ylabel('$e$')
#legend()
plt.grid(True)