SM115 - Bases du traitement de données (S. Mounier)
Cette salle concerne la partie du cours se statistique enseigné en M1
STEM. Elle traitera de la notion d'erreur statistique, de quelques test
monovariants, de l'ANOVA, de la droite de régression et de
l'optimisation simplexe. A la suite de cette partie de cours, des
exercices sont proposés aux étudiants pour mettre en application leur
connaissances.
CSM131 Spectroscopie avancée (S. Mounier/H. Hajjoul/R. Redon)
Spectroscopie avancée en environnement.
Recyclage des matériaux (P. Carriere)
ECUE 331 Microplastiques dans l'environnement : TP (P. Carriere)
Ecue 312 - Matériaux hybrides (FX Perrin)
ECUE 355T Projet Matériaux Innovants (P. Carrière)
ECUE 313 Matériaux intelligents (P. Carrière)
ECUE 313- Matériaux Intelligents (FX. Perrin)
Ce cours vise à faire un point sur les matériaux à libération contrôlée de principes actifs. Des exemples seront donnés relativement à des systèmes de protection contre la corrosion.
ECUE 333- Systèmes anticorrosion (FX. Perrin)
Ce cours porte sur la compréhension du mode d'action des revêtements à matrice organique pour la protection des métaux.Les différents moyens d'améliorer les propriétés barrière des revêtements seront étudiées puis le mode de protection active par l'incorporation d'inhibiteurs anticorrosion sera décrit.Les différents types d'inhibiteurs seront présentés en détaillant leur mode d'action propre.Les nouveaux systèmes anticorrosion respectueux de l'environnement seront également décrits à la fin du cours.
ECUE 331 Vieillissement des polymères et composites (JF Chailan)
Ce cours aborde les aspects chimiques de la dégradation des polymères et composites et de leurs propriétés sous l'effet des paramètres extérieurs: température (vieillissement thermique), radiations UV (vieillissement photochimique), rayonnements ionisants (vieillissement radiochimique).
ECUE Adhésion - collages (P. Carriere)
.
ECUE 322 - Matériaux composites (JF. Chailan)
Il s'agit d'une introduction aux matériaux composites à matrice polymère et renforts fibreux.Après avoir décrit la problématique liée aux composites ainsi que la nécessité d'avoir recours à ce type de matériaux dans une première partie, les différents polymères et renforts fibreux utilisés sont décrits dans une deuxième partie. Les principales méthodes de mise en oeuvre sont ensuite abordées dans une troisième partie pour finir sur l'importance des interphases spécifique à ce type de matériaux.
314 Matériaux bio-inspirés (Y. Blache)
ECUE 312 - Matériaux hybrides et nanocomposites (V. Chevallier)
Ce cours traite de l'élaboration, des propriétés et des applications des matériaux nanohybrides inorganiques, principalement à base d'oxyde métalliques et de métaux nobles.
ECUE 311 - Nanostructuration des matériaux organiques et propriétés locales (P. Carrière)
Spectroscopie Avancée (A. Merlen)
Cous de spectroscopie Raman adaptée à l'analyse de surface. Aspects expérimentaux et numériques.
Rapport bibliographique (P. Carrière)
Stage (P. Carrière)
Diffusion de neutrons (P. Carrière)
M311 Effets de taille (JC Valmalette)
M314- Matériaux Bio-inspirés (JC Valmalette)
CSM373- Photochimie&Photodégradation
Le cours de photochimie est un cours d'option en M1 STEM qui propose une
introduction à la chimie environnementale. Il est composé d'un cours
qui abordera les notions liées à la photochimie, puis une description
détaillée des processus de relaxation de l'énergie électronique et les
différents type de réaction. Une partie traitera de la cinétique des
réactions photochimiques permettant d'élucider les mécanismes
réactionnels et enfin, différents exemple seront proposé sur le rôle de
la photochimie en environnement (atmosphère, eau de surface, etc...). Ce
module est accompagné d'une séance de TP permettant de mettre en
application des notions abordée en cours, en particulier sur l'irriation
de la matière organique naturelle en solution et le suivi cinétique de
cette dégradation.
UE82 - vision (F. Bouchara)
systèmes embarqués (P. Biscaldi)
Piloter les relations avec les parties prenantes de l’organisation
M1 ISC - UE13 - apprentissage supervisé (F. Bouchara)
Ce cours a pour objectif de fournir aux étudiants les bases de l'apprentissage automatique supervisé. Les notions suivantes sont abordé :Régression linéaire, classification linéaire, régression logistique, méthodes à noyaux, SVM.
U21 Advanced control for autonomous vehicles
TU12 Marine environment – Fundamental principles of marine and coastal processes (Y. Oumieres)
Objectives: The main objectives of this course are (i) provide a general background in the field of marine sciences , (ii) introduce the basics of fluid mechanics applied to the ocean, (iii) provide the main dynamical solutions in a coastal environment (iv) provide a specific focus on wave dynamics (v) provide insights on modern oceanography products (numerical products, ocean databases) Contents: - General background on the marine physical environment - Fluid mechanics: Euler equation, general equations based on the ocean and atmospheric forces analysis. Notions of fluid turbulence. - Analytical solutions in coastal environment: Ekman solution / wind induced currents, inertial oscillations, tides, specific coastal processes : upwelling, downwelling, buoyancy currents, river plumes - Waves dynamics : waves induced current and pressure, stokes solutions, notion on the wave spectral approach for wave forecasting - Modern oceanography : existing numerical products, forecasting structures, ocean observations databases, data formats Practical Work: - dedicated sessions for analytical calculations on coastal currents and waves currents - practical work on ocean data processing, numerical format, ocean visualization tools, ocean databases. (using ad-hoc computer softwares)
UE12 - Automatique Linéaire des Systèmes Multivariables (JF. Balmat)
M1 ISC VISTA/ROC - UE23 - Techniques d'Optimisation (B. Borloz)
UE 12 - Automatique Linéaire des Systèmes Multivariables (JF. Balmat)
Devoir à distance (session 2 - semestre 1)
Optimisation numérique (C. Dune)
Ce cours est communs aux parcours ROC et VISTA du MASTER Ingénierie des Systèmes Complexes (ISC). Savoir formuler un problème d'optimisation numérique (identifier les paramètres, définir la fonction de coût, décrire les contraintes) Savoir le caractériser (linéaire ou non, avec ou sans contraintes) Savoir choisir la méthode d'optimisation adaptée au problème. Ce cours nécéssite l'installation de PYTHON >3.
Automatique non-linéaire (RISE UE 23) / Advanced control for autonomous vehicles (MIR UE22) - (N. Boizot)
UE22 - Instrumentation et capteurs embarqués (H. Barthelemy)
Linéarité, rapidité, précision des capteurs sont présentés. Ensuite certains montages électroniques ou « conditionneur » sont étudiés (ponts de Wheatstone, amplificateurs, différenciateurs, convertisseurs …). Les contraintes de mise en oeuvre dues aux sources de bruits et à la présence de tensions ou de courants d’offsets sont présentées. La notion et certains principes de calibration sont abordés. Le cours et les TD associés comportent des études de cas allant jusqu’à l’étude d’un système complet. Cette dernière étude comprend le calcul de l’amplificateur d’instrumentation à faible taux de réjection de mode commun et l’étude de convertisseurs analogique-numérique et numérique-analogique.Prérequis : Systèmes électriques linéaires & équations différentielle associées, fonctions de la variable complexe. Électronique analogique et numérique, transformée de Fourier, Série de Taylor, notion de traitement analogique et numérique du signal.
UE13 - Traitement Analogique du Signal (TAS) (H. Barthelemy)
Le numérique est aujourd'hui très présent, cependant la réalisation de certaines fonctions de traitement des signaux reste beaucoup plus immédiate et plus simple en analogique. Acquérir des compétences en électronique est indispensable pour faire le lien entre le monde physique et le traitement des signaux (commande de moteurs, amplification et filtrages de signaux, conversion analogique vers numérique et vis versa, génération de signaux...). Dans ce cours Les équations fondamentales du transistor MOS et du transistor Bipolaires sont présentées. Le fonctionnement en régime dynamique large signal et petit-signal est ensuite introduit pour la conception d'amplificateurs et pour l'utilisation des transistors en mode "interrupteur". Le cours présente aussi le principe de fonctionnement de l'amplificateur opérationnel tension (AOP tension, opamp) et plusieurs applications associées sont présentées (ex. amplification, filtrage, oscillateurs. Ce cours fait appel aux connaissance suivantes : Systèmes linéaires, transformée de Fourier, fonctions de la variable complexe, diagramme de Bode, principe électrique des systèmes linéaires, signaux DC (statiques) et AC (dynamiques).
UE 27 Apprentissage statistique profond / Perception multimodale (A. Paiement)
.
M1ROC - UE24 - Apprentissage profond (R. Marxer Pinon)
UE12 - Modélisation de systèmes mécaniques (C. Anthierens)
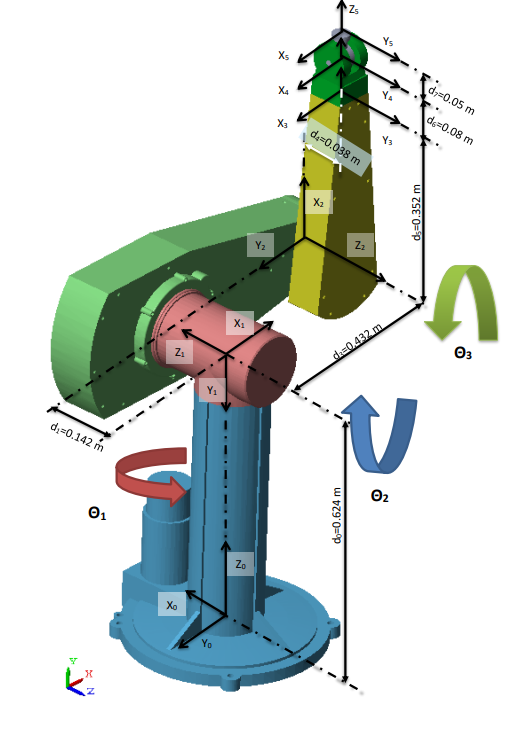 Modélisation et simulation de systèmes multicorps (géométrique et cinématique).
Modélisation et simulation de systèmes multicorps (géométrique et cinématique).